































അബ്ദുറഹ്മാൻ റെജബ് a , അലിരേസ അബ്ദുള്ളാഹി b , കരീം റെജബ് c , Horst Treiblmaier d,
- a ഡിപ്പാർട്ട്മെൻ്റ് ഓഫ് മാനേജ്മെൻ്റ് ആൻഡ് ലോ, ഫാക്കൽറ്റി ഓഫ് ഇക്കണോമിക്സ്, യൂണിവേഴ്സിറ്റി ഓഫ് റോം ടോർ വെർഗാറ്റ, കൊളംബിയ വഴി, 2, റോം 00133, ഇറ്റലി
- b ഡിപ്പാർട്ട്മെൻ്റ് ഓഫ് ബിസിനസ് അഡ്മിനിസ്ട്രേഷൻ, ഫാക്കൽറ്റി ഓഫ് മാനേജ്മെൻ്റ്, ഖരസ്മി യൂണിവേഴ്സിറ്റി, 1599964511 ടെഹ്റാൻ, ഇറാൻ
- c ഫാക്കൽറ്റി ഓഫ് ബിസെർട്ടെ, യൂണിവേഴ്സിറ്റി ഓഫ് കാർത്തേജ്, സർസൗന, 7021 ബിസെർട്ടെ, ടുണീഷ്യ
- d സ്കൂൾ ഓഫ് ഇൻ്റർനാഷണൽ മാനേജ്മെൻ്റ്, മോഡുൾ യൂണിവേഴ്സിറ്റി വിയന്ന, ആം കഹ്ലെൻബെർഗ് 1, 1190 വിയന്ന, ഓസ്ട്രിയ
| ആർട്ടിക്കിൾ വിവരം | ABSTRACT |
| അടയാളവാക്കുകൾ: ഡ്രോണുകൾ UAV കൃത്യമായ കൃഷി കാര്യങ്ങൾ ഇന്റർനെറ്റ് ബിബ്ലിയോമെട്രിക്സ് | ആളില്ലാ ഏരിയൽ വെഹിക്കിൾസ് (UAV) എന്നും അറിയപ്പെടുന്ന ഡ്രോണുകൾ സമീപ ദശകങ്ങളിൽ ശ്രദ്ധേയമായ വികസനത്തിന് സാക്ഷ്യം വഹിച്ചു. കൃഷിയിൽ, കർഷകർക്ക് ഗണ്യമായ ചിലവ് ലാഭം വാഗ്ദാനം ചെയ്തുകൊണ്ട് അവർ കൃഷിരീതികൾ മാറ്റി പ്രവർത്തനക്ഷമത, മെച്ചപ്പെട്ട ലാഭക്ഷമത. കഴിഞ്ഞ ദശകങ്ങളിൽ, കാർഷിക ഡ്രോണുകളുടെ വിഷയം ശ്രദ്ധേയമായ അക്കാദമിക് ശ്രദ്ധ ആകർഷിച്ചു. അതിനാൽ ഞങ്ങൾ ബിബ്ലിയോമെട്രിക്സ് അടിസ്ഥാനമാക്കി ഒരു സമഗ്രമായ അവലോകനം നടത്തുന്നു നിലവിലുള്ള അക്കാദമിക് സാഹിത്യങ്ങളെ സംഗ്രഹിക്കാനും രൂപപ്പെടുത്താനും നിലവിലെ ഗവേഷണ പ്രവണതകളും ഹോട്ട്സ്പോട്ടുകളും വെളിപ്പെടുത്താനും. ഞങ്ങൾ ബിബ്ലിയോമെട്രിക് ടെക്നിക്കുകൾ പ്രയോഗിക്കുകയും കാർഷിക ഡ്രോണുകളെ ചുറ്റിപ്പറ്റിയുള്ള സാഹിത്യം വിശകലനം ചെയ്യുകയും സംഗ്രഹിക്കുകയും ചെയ്യുക മുൻ ഗവേഷണം വിലയിരുത്തുക. റിമോട്ട് സെൻസിംഗ്, പ്രിസിഷൻ അഗ്രികൾച്ചർ, ഡീപ് ലേണിംഗ്, മെഷീൻ ലേണിംഗ്, ഇൻ്റർനെറ്റ് ഓഫ് തിംഗ്സ് എന്നിവ കാർഷിക ഡ്രോണുകളുമായി ബന്ധപ്പെട്ട നിർണായക വിഷയങ്ങളാണെന്ന് ഞങ്ങളുടെ വിശകലനം സൂചിപ്പിക്കുന്നു. സഹ അവലംബം സാഹിത്യത്തിലെ ആറ് വിശാലമായ ഗവേഷണ ക്ലസ്റ്ററുകൾ വിശകലനം വെളിപ്പെടുത്തുന്നു. കാർഷിക മേഖലയിലെ ഡ്രോൺ ഗവേഷണം സംഗ്രഹിക്കാനും ഭാവി ഗവേഷണ ദിശകൾ നിർദ്ദേശിക്കാനുമുള്ള ആദ്യ ശ്രമങ്ങളിലൊന്നാണ് ഈ പഠനം. |
അവതാരിക
ലോകത്തിൻ്റെ പ്രാഥമിക ഭക്ഷ്യ സ്രോതസ്സായ കൃഷിയെ പ്രതിനിധീകരിക്കുന്നു (ഫ്രിഹ et al., 2021), കാരണം ഇത് കടുത്ത വെല്ലുവിളികൾ നേരിടുന്നു.
ഭക്ഷ്യ ഉൽപന്നങ്ങളുടെ വർദ്ധിച്ചുവരുന്ന ആവശ്യം, ഭക്ഷ്യ സുരക്ഷ, സുരക്ഷാ ആശങ്കകൾ കൂടാതെ പരിസ്ഥിതി സംരക്ഷണം, ജല സംരക്ഷണം, കൂടാതെ
സുസ്ഥിരത (Inoue, 2020). 9.7-ഓടെ ലോകജനസംഖ്യ 2050 ബില്യണിൽ എത്തുമെന്ന് കണക്കാക്കപ്പെടുന്നതിനാൽ ഈ വികസനം തുടരുമെന്ന് പ്രവചിക്കപ്പെടുന്നു
(2019). ആഗോളതലത്തിൽ ജല ഉപഭോഗത്തിൻ്റെ ഏറ്റവും പ്രധാനപ്പെട്ട ഉദാഹരണം കാർഷിക മേഖലയായതിനാൽ, ഭക്ഷണത്തിൻ്റെ ആവശ്യകതയും വെള്ളവും പ്രതീക്ഷിക്കുന്നു
ഭാവിയിൽ ഉപഭോഗം ഗണ്യമായി വർദ്ധിക്കും. കൂടാതെ, രാസവളങ്ങളുടെയും കീടനാശിനികളുടെയും ഉപഭോഗം വർദ്ധിക്കുന്നു
കാർഷിക പ്രവർത്തനങ്ങളുടെ തീവ്രതയോടൊപ്പം ഭാവിയിലെ പാരിസ്ഥിതിക വെല്ലുവിളികളിലേക്കും നയിച്ചേക്കാം. അതുപോലെ, കൃഷിയോഗ്യമായ ഭൂമി പരിമിതമാണ്, കൂടാതെ
ലോകമെമ്പാടും കർഷകരുടെ എണ്ണം കുറയുന്നു. ഈ വെല്ലുവിളികൾ നൂതനവും സുസ്ഥിരവുമായ കാർഷിക പരിഹാരങ്ങളുടെ ആവശ്യകതയെ ഊന്നിപ്പറയുന്നു (ഏലിയാഹ്
et al., 2018; Friha et al., 2021; Inoue, 2020; സോണിസ് et al., 2017).
ഈ വെല്ലുവിളികളെ അഭിമുഖീകരിക്കുന്നതിനുള്ള വാഗ്ദാനമായ പരിഹാരമായി നവീന സാങ്കേതികവിദ്യകൾ ഉൾപ്പെടുത്തുന്നത് തിരിച്ചറിഞ്ഞിട്ടുണ്ട്. സ്മാർട്ട് ഫാമിംഗ് (ബ്രൂസ്റ്റർ et al.,
2017; ടാങ് et al., 2021), കൃത്യമായ കൃഷിയും (Feng et al., 2019; Khanna & Kaur, 2019) ഇത്തരം സംവാദങ്ങളുടെ ഫലമായി ഉയർന്നുവന്നു. ദി
കാര്യക്ഷമതയും ഫലപ്രാപ്തിയും വർദ്ധിപ്പിക്കുന്നതിനായി കാർഷിക പ്രവർത്തനങ്ങളിൽ ഇൻഫർമേഷൻ കമ്മ്യൂണിക്കേഷൻ ടെക്നോളജികളും (ഐസിടി) മറ്റ് അത്യാധുനിക നവീകരണങ്ങളും സ്വീകരിക്കുന്നതിനുള്ള ഒരു പൊതു ആശയമാണ് മുമ്പത്തേത് (Haque et al., 2021). ഭൂമിയെ വിഭജിച്ചിരിക്കുന്ന സൈറ്റ്-നിർദ്ദിഷ്ട മാനേജ്മെൻ്റിൽ രണ്ടാമത്തേത് ശ്രദ്ധ കേന്ദ്രീകരിക്കുന്നു
ഏകതാനമായ ഭാഗങ്ങൾ, കൂടാതെ ഓരോ ഭാഗത്തിനും നൂതന സാങ്കേതികവിദ്യകൾ വഴി വിള വിളവ് ഒപ്റ്റിമൈസേഷനായി കാർഷിക ഇൻപുട്ടിൻ്റെ കൃത്യമായ അളവ് ലഭിക്കുന്നു (ഫെങ് മറ്റുള്ളവരും, 2019; ഖന്ന & കൗർ, 2019). വയർലെസ് സെൻസർ നെറ്റ്വർക്കുകൾ (WSNs) (J. Zheng & Yang, 2018; Y. Zhou et al., 2016), The Internet of Things (IoT) (ഗിൽ et al., 2017; അവൻ et al., 2021; 2019;
മെഷീൻ ലേണിംഗും ആഴത്തിലുള്ള പഠനവും ഉൾപ്പെടെയുള്ള ആർട്ടിഫിഷ്യൽ ഇൻ്റലിജൻസ് (AI) ടെക്നിക്കുകൾ (ലിയാക്കോസ് et al., 2018; Parsaeian et al., 2020; Shadrin et al.,
2019), കമ്പ്യൂട്ടിംഗ് സാങ്കേതികവിദ്യകൾ (Hsu et al., 2020; Jinbo et al., 2019; Zamora-Izquierdo et al., 2019), വലിയ ഡാറ്റ (ഗിൽ et al., 2017; Tantalaki
et al., 2019), ബ്ലോക്ക്ചെയിൻ (PW Khan et al., 2020; Pincheira et al., 2021).
മേൽപ്പറഞ്ഞ സാങ്കേതികവിദ്യകൾക്ക് പുറമേ, റിമോട്ട് സെൻസിംഗ് മെച്ചപ്പെടുത്താനുള്ള ഉയർന്ന സാധ്യതയുള്ള ഒരു സാങ്കേതിക ഉപകരണമായി കണക്കാക്കപ്പെട്ടിരിക്കുന്നു.
സ്മാർട്ടും കൃത്യവുമായ കൃഷി. ഉപഗ്രഹങ്ങൾ, മനുഷ്യർ ജോലി ചെയ്യുന്ന വിമാനങ്ങൾ, ഡ്രോണുകൾ എന്നിവ ജനപ്രിയ റിമോട്ട് സെൻസിംഗ് സാങ്കേതികവിദ്യകളാണ് (Tsouros et al., 2019).
ആളില്ലാ ഏരിയൽ വെഹിക്കിൾസ് (യുഎവി), ആളില്ലാ എയർക്രാഫ്റ്റ് സിസ്റ്റംസ് (യുഎഎസ്), റിമോട്ട് പൈലറ്റഡ് എയർക്രാഫ്റ്റുകൾ എന്നിങ്ങനെ അറിയപ്പെടുന്ന ഡ്രോണുകൾ
മറ്റ് റിമോട്ട് സെൻസിംഗ് സാങ്കേതികവിദ്യകളുമായി താരതമ്യപ്പെടുത്തുമ്പോൾ അവയ്ക്ക് ഒന്നിലധികം ഗുണങ്ങളുള്ളതിനാൽ വലിയ പ്രാധാന്യമുണ്ട്. ഉദാഹരണത്തിന്, ഡ്രോണുകൾക്ക് വിതരണം ചെയ്യാൻ കഴിയും
തെളിഞ്ഞ ദിവസങ്ങളിൽ ഉയർന്ന നിലവാരമുള്ളതും ഉയർന്ന റെസല്യൂഷനുള്ളതുമായ ചിത്രങ്ങൾ (Manfreda et al., 2018). കൂടാതെ, അവയുടെ ലഭ്യതയും കൈമാറ്റ വേഗതയും മറ്റൊന്നാണ്
ആനുകൂല്യങ്ങൾ (റാഡോഗ്ലോ-ഗ്രാമമാറ്റിക്കിസ് മറ്റുള്ളവരും, 2020). വിമാനവുമായി താരതമ്യപ്പെടുത്തുമ്പോൾ, ഡ്രോണുകൾ വളരെ ചെലവ് കുറഞ്ഞതും സജ്ജീകരിക്കാനും പരിപാലിക്കാനും എളുപ്പമാണ് (Tsouros et al., 2019). തുടക്കത്തിൽ പ്രധാനമായും സൈനിക ആവശ്യങ്ങൾക്കായി ഉപയോഗിച്ചിരുന്നെങ്കിലും, ഡ്രോണുകൾക്ക് നിരവധി സിവിലിയൻ ആപ്ലിക്കേഷനുകൾക്ക് പ്രയോജനം ലഭിക്കും, ഉദാഹരണത്തിന് സപ്ലൈ ചെയിൻ മാനേജ്മെൻ്റിൽ (A. Rejeb, Rejeb, et al., 2021a), മാനുഷിക ആവശ്യങ്ങൾക്കായി (A. Rejeb, Rejeb, et al., 2021c), സ്മാർട്ട് അഗ്രികൾച്ചർ, സർവേയിംഗ് ആൻഡ് മാപ്പിംഗ്, സാംസ്കാരിക പൈതൃക ഡോക്യുമെൻ്റേഷൻ, ഡിസാസ്റ്റർ മാനേജ്മെൻ്റ്, വനം, വന്യജീവി സംരക്ഷണം (പാണ്ടേ, പ്രതിഹസ്റ്റ്, et al., 2020). കൃഷിയിൽ, ഡ്രോണുകളുടെ വൈവിധ്യമാർന്ന ആപ്ലിക്കേഷൻ ഏരിയകൾ നിലവിലുണ്ട്, കാരണം അവ പുതിയ സാങ്കേതികവിദ്യകൾ, കമ്പ്യൂട്ടിംഗ് കഴിവുകൾ, വിള പരിപാലനത്തെ (ഉദാ, മാപ്പിംഗ്, നിരീക്ഷണം, ജലസേചനം, സസ്യ രോഗനിർണയം) പിന്തുണയ്ക്കുന്നതിന് ഓൺബോർഡ് സെൻസറുകൾ എന്നിവയുമായി സംയോജിപ്പിക്കാൻ കഴിയും (H. Huang et al., 2021) , ദുരന്തനിവാരണം, മുൻകൂർ മുന്നറിയിപ്പ് സംവിധാനങ്ങൾ, വന്യജീവി, വനസംരക്ഷണം എന്നിവയിൽ ചിലത് (Negash et al., 2019). അതുപോലെ, വിളയും വളർച്ചയും നിരീക്ഷിക്കൽ, വിളവ് കണക്കാക്കൽ, ജല സമ്മർദ്ദം വിലയിരുത്തൽ, കളകൾ, കീടങ്ങൾ, രോഗം എന്നിവ കണ്ടെത്തൽ (Inoue, 2020; Panday, Pratihast, et al., 2020) എന്നിവയുൾപ്പെടെ നിരവധി കാർഷിക പ്രവർത്തനങ്ങളിൽ ഡ്രോണുകൾ പ്രയോജനപ്പെടുത്താം. ഡ്രോണുകൾ അവയുടെ സെൻസറി ഡാറ്റയെ അടിസ്ഥാനമാക്കി നിരീക്ഷണം, എസ്റ്റിമേഷൻ, കണ്ടെത്തൽ ആവശ്യങ്ങൾക്ക് മാത്രമല്ല, കൃത്യമായ ജലസേചനത്തിനും കൃത്യമായ കള, കീടങ്ങൾ, രോഗം എന്നിവ കൈകാര്യം ചെയ്യുന്നതിനും ഉപയോഗിക്കാനാകും. മറ്റൊരു വിധത്തിൽ പറഞ്ഞാൽ, പാരിസ്ഥിതിക ഡാറ്റയെ അടിസ്ഥാനമാക്കി കൃത്യമായ അളവിൽ വെള്ളവും കീടനാശിനികളും തളിക്കാൻ ഡ്രോണുകൾക്ക് കഴിയും. കാർഷിക മേഖലയിലെ ഡ്രോണുകളുടെ പ്രയോജനങ്ങൾ പട്ടിക 1 ൽ സംഗ്രഹിച്ചിരിക്കുന്നു.
കാർഷിക മേഖലയിലെ ഡ്രോണുകളുടെ പ്രധാന നേട്ടങ്ങൾ.
| ആനുകൂല്യം | റഫറൻസ്(കൾ) |
| താൽക്കാലികവും സ്ഥലപരവും മെച്ചപ്പെടുത്തുക പ്രമേയങ്ങൾ മനസ്സിലാക്കുന്നു | (ഗാഗോ et al., 2015; Niu et al., 2020; ശ്രീവാസ്തവ et al., 2020) |
| കൃത്യമായ കൃഷി സുഗമമാക്കുക | (L. Deng et al., 2018; Kalischuk et al., 2019; മൈമൈതിജിയാങ് et al., 2017) |
| വർഗ്ഗീകരണവും സ്കൗട്ടിംഗും വിളകൾ | (ഇനൗ, 2020; കലിസ്ചുക്ക് et al., 2019; ലോപ്പസ്-' ഗ്രാനഡോസ് et al., 2016; Maimaitijiang et al., 2017; Melville et al., 2019; മോഹന & ദത്ത, 2016) |
| വളത്തിൻ്റെ ഉപയോഗം | (L. Deng et al., 2018; Guan et al., 2019) |
| വരൾച്ചയുടെ നിരീക്ഷണം | (Fawcett et al., 2020; Panday, Pratihast, et al., 2020; സു തുടങ്ങിയവർ, 2018) |
| ബയോമാസ് കണക്കാക്കൽ | (Bendig et al., 2014) |
| വിളവ് കണക്കാക്കൽ | (ഇനൗ, 2020; പാണ്ഡേ, ശ്രേഷ്ഠ, മറ്റുള്ളവരും, 2020; താവോ et al., 2020) |
| ദുരന്തം കുറയ്ക്കൽ | (Negash et al., 2019) |
| വന്യജീവി സംരക്ഷണവും വനം | (നെഗാഷ് et al., 2019; പാണ്ഡേ, പ്രതിഹസ്റ്റ്, et al., 2020) |
| ജല സമ്മർദ്ദത്തിൻ്റെ വിലയിരുത്തൽ | (ഇനൗ, 2020; ജെ. സു, കൂംബ്സ്, et al., 2018; എൽ. ഷാങ് et al., 2019) |
| കീടങ്ങൾ, കളകൾ, രോഗം കണ്ടെത്തൽ | (Gaˇsparovi´c et al., 2020; Inoue, 2020; J. Su, Liu, et al., 2018; X. Zhang et al., 2019) |
മറുവശത്ത്, ഡ്രോണുകൾ പരിമിതികളും നേരിടുന്നു. പൈലറ്റ് ഇടപെടൽ, എഞ്ചിൻ ശക്തി, സ്ഥിരതയും വിശ്വാസ്യതയും, പേലോഡ് കാരണം സെൻസറുകളുടെ ഗുണനിലവാരം
ഭാരം പരിമിതികൾ, നടപ്പാക്കൽ ചെലവുകൾ, വ്യോമയാന നിയന്ത്രണം എന്നിവ അവയിൽ ഉൾപ്പെടുന്നു (C. Zhang & Kovacs, 2012). ഞങ്ങൾ കുറവുകൾ താരതമ്യം ചെയ്യുന്നു
പട്ടിക 2-ലെ മൂന്ന് മൊബൈൽ റിമോട്ട് സെൻസിംഗ് സാങ്കേതികവിദ്യകളിൽ. മണ്ണ് സെൻസറുകൾ പോലെയുള്ള മറ്റ് റിമോട്ട് സെൻസിംഗ് സാങ്കേതികവിദ്യകൾ ഈ പഠനത്തിൻ്റെ ശ്രദ്ധയ്ക്ക് അതീതമാണ്.
വിവിധ മൊബൈൽ റിമോട്ട് സെൻസിംഗ് സാങ്കേതികവിദ്യകളുടെ പോരായ്മകൾ.
| വിദൂര സംവേദനം സാങ്കേതികവിദ്യകൾ | കുറവുകൾ | അവലംബം |
| ഡ്രോൺ (UAV) | പൈലറ്റ് പങ്കാളിത്തം; ചിത്രങ്ങൾ' ഗുണനിലവാരം (ശരാശരി); നടപ്പാക്കൽ ചെലവ് (ശരാശരി); സ്ഥിരത, കുസൃതി, ഒപ്പം വിശ്വാസ്യത; സ്റ്റാൻഡേർഡൈസേഷൻ; എഞ്ചിൻ ശക്തി; പരിമിതമായ ശക്തി ഉറവിടങ്ങൾ (ബാറ്ററി ദീർഘായുസ്സ്); പരിമിതമായ ഫ്ലൈറ്റ് ദൈർഘ്യം, കൂട്ടിയിടി സൈബർ ആക്രമണങ്ങളും; പരിമിതപ്പെടുത്തിയിരിക്കുന്നു പേലോഡ് ഭാരം; വലിയ ഡാറ്റാസെറ്റുകൾ പരിമിതമായ ഡാറ്റ പ്രോസസ്സിംഗും കഴിവുകൾ; നിയന്ത്രണത്തിൻ്റെ അഭാവം; വൈദഗ്ധ്യത്തിൻ്റെ അഭാവം, ഉയർന്ന പ്രവേശനം പ്രവേശനത്തിനുള്ള തടസ്സങ്ങൾ കാർഷിക ഡ്രോണുകൾ; | (ബാക്കോ et al., 2018; ദാവാലിബി et al., 2020; ഹാർഡിൻ & ഹാർഡിൻ, 2010; ഹാർഡിൻ & ജെൻസൻ, 2011; ലഗ്കാസ് et al., 2018; Laliberte et al., 2007; Laliberte & Rango, 2011; Manfreda et al., 2018, 2018; Nebiker et al., 2008; പുരി et al., 2017; വേലുസാമി തുടങ്ങിയവർ. 2022; സി. ഷാങ് & കോവാക്സ്, 2012) |
| ഉപഗ്രഹം | ആനുകാലിക ഉപഗ്രഹ കവറേജ്, പരിമിതമായ സ്പെക്ട്രൽ റെസലൂഷൻ; ദൃശ്യപരത പ്രശ്നങ്ങൾക്കുള്ള അപകടസാധ്യത (ഉദാ, മേഘങ്ങൾ); ലഭ്യതയില്ല കുറഞ്ഞ ട്രാൻസ്ഫർ വേഗതയും; ഓറിയൻ്റേഷനും വിഗ്നറ്റിംഗും ചെലവേറിയ സ്പേഷ്യൽ ഡാറ്റയെ ബാധിക്കുന്നു സമാഹാരം; വേഗത കുറഞ്ഞ ഡാറ്റ ഡെലിവറി അന്തിമ ഉപയോക്താക്കളുടെ സമയം | (Aboutalebi et al., 2019; സെൻ et al., 2019; ചെൻ തുടങ്ങിയവർ., 2019; നാൻസൻ & എലിയട്ട്, 2016; പാണ്ഡേ, പ്രതിഹസ്ത്, et al., 2020; സായ് വിനീത് et al., 2019) |
| വോമയാനോപായങ്ങള് | ഉയർന്ന ദത്തെടുക്കൽ ചെലവ്; സങ്കീർണ്ണമായ സജ്ജീകരണം; പരിപാലന ചെലവ്; വിശ്വസനീയമായ അഭാവം വിമാനങ്ങൾ, ജ്യാമിതി ചിത്രങ്ങൾ; നോൺ-റെഗുലർ ഡാറ്റ കൈവശപ്പെടുത്തൽ; വഴക്കത്തിൻ്റെ അഭാവം; മാരകമായ അപകടങ്ങൾ; സെൻസർ ഡാറ്റ വൈബ്രേഷനുകൾ മൂലമുള്ള വ്യതിയാനങ്ങൾ; ജിയോ റഫറൻസിംഗ് പ്രശ്നങ്ങൾ | (Amstrong et al., 2011; അറ്റ്കിൻസൺ et al., 2018; ബാർബെഡോ & കൊയിനിക്കൻ, 2018; കോവലെവ് & വോറോഷിലോവ, 2020; സുവോമലൈനൻ et al., 2013; താം et al., 2013) |
കാർഷിക മേഖലയിലെ ഒരു മൾട്ടി ഡിസിപ്ലിനറി, മൾട്ടി പർപ്പസ് സാങ്കേതികവിദ്യ എന്ന നിലയിൽ, ഡ്രോണുകൾ വിവിധ വീക്ഷണകോണുകളിൽ നിന്ന് അന്വേഷിച്ചു. ഉദാഹരണത്തിന്, കൃഷിയിലെ ഡ്രോൺ ആപ്ലിക്കേഷനുകൾ പണ്ഡിതന്മാർ പരിശോധിച്ചു (Kulbacki et al., 2018; Mogili & Deepak, 2018), കൃത്യമായ കൃഷിയിലേക്കുള്ള അവരുടെ സംഭാവന (Puri et al., 2017; Tsouros et al., 2019), മറ്റുള്ളവയുമായി അവയുടെ പൂരകത്വം അത്യാധുനിക സാങ്കേതികവിദ്യകൾ (അൽ-താനി et al., 2020; Dutta & Mitra, 2021; Nayyar et al., 2020; Saha et al., 2018), കൂടാതെ അവരുടെ നാവിഗേഷൻ, സെൻസിംഗ് കഴിവുകൾ വികസിപ്പിക്കുന്നതിനുള്ള സാധ്യതകൾ (alBare. , 2015; സുവോമലൈനൻ et al., 2014). കാർഷിക മേഖലയിലെ ഡ്രോൺ ആപ്ലിക്കേഷനുകളെക്കുറിച്ചുള്ള ഗവേഷണം പ്രചാരത്തിലായതിനാൽ (ഖാൻ et al., 2021), നിലവിലുള്ള സാഹിത്യങ്ങളെ സംഗ്രഹിക്കുകയും ഡൊമെയ്നിൻ്റെ ബൗദ്ധിക ഘടന വെളിപ്പെടുത്തുകയും ചെയ്യേണ്ടത് ആവശ്യമാണ്. കൂടാതെ, തുടർച്ചയായ മെച്ചപ്പെടുത്തലുകളുള്ള ഒരു ഹൈടെക് ഫീൽഡ് എന്ന നിലയിൽ, നിലവിലുള്ള സാഹിത്യങ്ങളെ ഇടയ്ക്കിടെ സംഗ്രഹിക്കാനും പ്രധാനപ്പെട്ട ഗവേഷണ വിടവുകൾ തിരിച്ചറിയാനും ഘടനാപരമായ അവലോകനങ്ങൾ നടത്തേണ്ടതുണ്ട്. ലേക്ക്
തീയതി, കാർഷിക മേഖലയിലെ ഡ്രോൺ ആപ്ലിക്കേഷനുകൾ ചർച്ച ചെയ്യുന്ന കുറച്ച് അവലോകനങ്ങളുണ്ട്. ഉദാഹരണത്തിന്, മൊഗിലിയും ദീപക്കും (2018) വിള നിരീക്ഷണത്തിനും കീടനാശിനി തളിക്കുന്നതിനുമുള്ള ഡ്രോണുകളുടെ പ്രത്യാഘാതങ്ങൾ ഹ്രസ്വമായി അവലോകനം ചെയ്തു. Inoue (2020) കാർഷിക മേഖലയിലെ റിമോട്ട് സെൻസിംഗിൽ ഉപഗ്രഹത്തിൻ്റെയും ഡ്രോൺ ഉപയോഗത്തിൻ്റെയും അവലോകനം നടത്തുന്നു. സ്മാർട്ട് ഫാമിംഗ് സ്വീകരിക്കുന്നതിലെ സാങ്കേതിക വെല്ലുവിളികളും കേസ് പഠനങ്ങളും മികച്ച രീതികളും അടിസ്ഥാനമാക്കി ഉപഗ്രഹങ്ങളുടെയും ഡ്രോണുകളുടെയും സംഭാവനകളും രചയിതാവ് പര്യവേക്ഷണം ചെയ്യുന്നു. Tsouros et al. (2019) വിവിധ തരം ഡ്രോണുകളും കാർഷിക മേഖലയിലെ അവയുടെ പ്രധാന പ്രയോഗങ്ങളും സംഗ്രഹിക്കുക, വിവിധ ഡാറ്റ ഏറ്റെടുക്കലും പ്രോസസ്സിംഗ് രീതികളും എടുത്തുകാണിക്കുന്നു. അടുത്തിടെ, അസ്ലാൻ et al. (2022) കാർഷിക പ്രവർത്തനങ്ങളിലെ യുഎവി ആപ്ലിക്കേഷനുകളുടെ സമഗ്രമായ അവലോകനം നടത്തുകയും ഹരിതഗൃഹത്തിലെ യുഎവിക്ക് ഒരേസമയം പ്രാദേശികവൽക്കരണത്തിൻ്റെയും മാപ്പിംഗിൻ്റെയും പ്രസക്തി അടിവരയിടുകയും ചെയ്തു. ഡയസ്-ഗോൺസാലസ് തുടങ്ങിയവർ. (2022) വ്യത്യസ്ത മെഷീൻ ലേണിംഗ് ടെക്നിക്കുകളും റിമോട്ടും അടിസ്ഥാനമാക്കിയുള്ള വിള ഉൽപാദനത്തെക്കുറിച്ചുള്ള സമീപകാല പഠനങ്ങൾ അവലോകനം ചെയ്തു
സെൻസിംഗ് സിസ്റ്റങ്ങൾ. മണ്ണിൻ്റെ സൂചകങ്ങൾ കണക്കാക്കാനും സ്പേഷ്യൽ റെസല്യൂഷൻ, ഇൻഫർമേഷൻ ടെമ്പറാലിറ്റി, ഫ്ലെക്സിബിലിറ്റി എന്നിവയിൽ ഉപഗ്രഹ സംവിധാനങ്ങളെ മറികടക്കാനും യുഎവികൾ ഉപയോഗപ്രദമാണെന്ന് അവരുടെ കണ്ടെത്തലുകൾ സൂചിപ്പിച്ചു. ബസിരി തുടങ്ങിയവർ. (2022) കൃത്യമായ കൃഷിയുടെ പശ്ചാത്തലത്തിൽ മൾട്ടി-റോട്ടർ യുഎവികൾക്കുള്ള പാത്ത് പ്ലാനിംഗ് വെല്ലുവിളികളെ തരണം ചെയ്യുന്നതിനുള്ള വിവിധ സമീപനങ്ങളെയും രീതികളെയും കുറിച്ച് സമഗ്രമായ അവലോകനം നടത്തി. മാത്രമല്ല, അവായിസ് et al. (2022) ജലത്തിൻ്റെ നില കണക്കാക്കാൻ വിളകളിലെ UAV റിമോട്ട് സെൻസിംഗ് ഡാറ്റയുടെ പ്രയോഗത്തെ സംഗ്രഹിക്കുകയും പാഴ് സമ്മർദ്ദം പ്രയോഗിക്കുന്നതിനുള്ള UAV റിമോട്ട് സെൻസിംഗിൻ്റെ സാധ്യതയുടെ ഒരു ആഴത്തിലുള്ള സമന്വയം നൽകുകയും ചെയ്തു. ഒടുവിൽ, അക്വിലാനി et al. (2022) മേച്ചിൽപ്പുറത്തെ അടിസ്ഥാനമാക്കിയുള്ള കന്നുകാലി സംവിധാനങ്ങളിൽ പ്രയോഗിച്ച പ്രിവിഷൻ ഫാമിംഗ് സാങ്കേതികവിദ്യകൾ അവലോകനം ചെയ്യുകയും യുഎവികൾ പ്രാപ്തമാക്കിയ റിമോട്ട് സെൻസിംഗ് ബയോമാസ് വിലയിരുത്തലിനും കന്നുകാലി പരിപാലനത്തിനും പ്രയോജനകരമാണെന്ന് അനുമാനിക്കുകയും ചെയ്തു.
കൂടാതെ, കന്നുകാലികളെ നിരീക്ഷിക്കുന്നതിനും ട്രാക്കുചെയ്യുന്നതിനും ശേഖരിക്കുന്നതിനും യുഎവികൾ ഉപയോഗിക്കാനുള്ള ശ്രമങ്ങൾ അടുത്തിടെ റിപ്പോർട്ട് ചെയ്യപ്പെട്ടിട്ടുണ്ട്.
ഈ അവലോകനങ്ങൾ പുതിയതും പ്രധാനപ്പെട്ടതുമായ ഉൾക്കാഴ്ചകൾ നൽകുന്നുണ്ടെങ്കിലും, ഗ്രന്ഥസൂചികകളെ അടിസ്ഥാനമാക്കിയുള്ള സമഗ്രവും കാലികവുമായ ഒരു അവലോകനവും സാഹിത്യത്തിൽ കണ്ടെത്താനാവില്ല, ഇത് വ്യക്തമായ അറിവിൻ്റെ വിടവ് അവതരിപ്പിക്കുന്നു. മാത്രവുമല്ല, ശാസ്ത്രീയമായ ഒരു ഡൊമെയ്നിൽ പണ്ഡിതോചിതമായ ഉൽപ്പാദനം വളരുമ്പോൾ, ഡൊമെയ്നിൻ്റെ വിജ്ഞാന ഘടന മനസ്സിലാക്കാൻ ഗവേഷകർ അളവ് അവലോകന സമീപനങ്ങൾ അവലംബിക്കേണ്ടത് അത്യന്താപേക്ഷിതമാണെന്ന് പ്രസ്താവിച്ചിട്ടുണ്ട് (റിവേര & പിസാം, 2015). അതുപോലെ, ഫെരേര et al. (2014) ഗവേഷണ മേഖലകൾ പക്വത പ്രാപിക്കുകയും സങ്കീർണ്ണമാവുകയും ചെയ്യുമ്പോൾ, പുതിയ സംഭാവനകൾ വെളിപ്പെടുത്താനും ഗവേഷണ പാരമ്പര്യങ്ങളും ട്രെൻഡുകളും പിടിച്ചെടുക്കാനും ഏത് വിഷയങ്ങളാണ് പഠിച്ചിട്ടുള്ളതെന്ന് തിരിച്ചറിയാനും വിജ്ഞാന ഘടനയിലേക്ക് ആഴ്ന്നിറങ്ങാനും പണ്ഡിതന്മാർ ഇടയ്ക്കിടെ സൃഷ്ടിക്കുകയും ശേഖരിക്കുകയും ചെയ്യുന്ന അറിവ് മനസ്സിലാക്കാൻ ലക്ഷ്യമിടുന്നു. മേഖലയും സാധ്യതയുള്ള ഗവേഷണ ദിശകളും. Raparelli and Bajocco (2019) കൃഷി, വനവൽക്കരണം എന്നിവയിലെ ഡ്രോൺ ആപ്ലിക്കേഷനുകളുടെ വിജ്ഞാന ഡൊമെയ്ൻ പരിശോധിക്കാൻ ഒരു ബിബ്ലിയോമെട്രിക് വിശകലനം നടത്തിയപ്പോൾ, അവരുടെ പഠനം 1995 നും 2017 നും ഇടയിൽ പ്രസിദ്ധീകരിച്ച പണ്ഡിതോചിതമായ ഗവേഷണം മാത്രമാണ് പരിഗണിക്കുന്നത്, ഇത് അതിവേഗം ചലിക്കുന്ന ഈ പ്രദേശത്തിൻ്റെ ചലനാത്മകതയെ പ്രതിഫലിപ്പിക്കുന്നില്ല. കൂടാതെ, രചയിതാക്കൾ ഈ മേഖലയിലെ ഏറ്റവും സ്വാധീനമുള്ള സംഭാവനകളെ തിരിച്ചറിയാനും സാഹിത്യത്തെ ക്ലസ്റ്റർ ചെയ്യാനും സഹ ഉദ്ധരണി വിശകലനം ഉപയോഗിച്ച് ബൗദ്ധിക ഘടനയെ വിലയിരുത്താനും ശ്രമിച്ചില്ല. തൽഫലമായി, നിലവിലെ ഗവേഷണ കേന്ദ്രങ്ങൾ, ട്രെൻഡുകൾ, ഹോട്ട്സ്പോട്ടുകൾ എന്നിവ വെളിപ്പെടുത്തുന്നതിന് സാഹിത്യത്തെ സംഗ്രഹിക്കേണ്ടത് ആവശ്യമാണ്.
ഈ വിജ്ഞാന വിടവ് നികത്താൻ, ഡ്രോണുകളുടെയും കൃഷിയുടെയും കവലയിലെ ഗവേഷണത്തിൻ്റെ നിലവിലെ അവസ്ഥ പരിശോധിക്കാൻ ഞങ്ങൾ ക്വാണ്ടിറ്റേറ്റീവ് മെത്തഡോളജിയും കർശനമായ ബിബ്ലിയോമെട്രിക് രീതികളും പ്രയോജനപ്പെടുത്തുന്നു. ഈ മേഖലയിലെ നിരവധി വശങ്ങൾ മാറ്റാൻ അത്യധികം സാധ്യതകൾ നൽകുന്നതിനാൽ, കാർഷികരംഗത്ത് വളരെയധികം ആവശ്യമുള്ള വളർന്നുവരുന്ന ഒരു സാങ്കേതികവിദ്യ പരിശോധിച്ചുകൊണ്ട് നിലവിലെ പഠനം നിലവിലുള്ള സാഹിത്യത്തിന് നിരവധി സംഭാവനകൾ നൽകുന്നുവെന്ന് ഞങ്ങൾ വാദിക്കുന്നു. കാർഷിക പശ്ചാത്തലത്തിൽ ഡ്രോണുകളെക്കുറിച്ചുള്ള ചിതറിക്കിടക്കുന്നതും വിഘടിച്ചതുമായ അറിവ് കണക്കിലെടുക്കുമ്പോൾ കാർഷിക ഡ്രോണുകളുടെ ഒരു ബിബ്ലിയോമെട്രിക് വിശകലനത്തിൻ്റെ ആവശ്യകത കൂടുതൽ മനസ്സിലാക്കാൻ കഴിയും. അതുപോലെ, ഈ ഗവേഷണ മേഖലയുടെ അടിത്തറ കെട്ടിപ്പടുക്കുന്ന ഏറ്റവും സ്വാധീനമുള്ള പഠനങ്ങൾ കണക്കിലെടുത്ത് കാർഷിക ഡ്രോണുകളെ സംബന്ധിക്കുന്ന സാഹിത്യങ്ങൾ വ്യവസ്ഥാപിതമായി ക്ലസ്റ്റർ ചെയ്യേണ്ടതുണ്ട്. വിശകലനത്തിലെ മെറിറ്റിൽ സാഹിത്യത്തിൽ പ്രതിനിധീകരിക്കുന്ന പ്രധാന ഗവേഷണ വിഷയങ്ങളുടെ വ്യക്തതയും ഉൾപ്പെടുന്നു. സാങ്കേതികവിദ്യയുടെ പരിവർത്തന സാധ്യതകൾ കണക്കിലെടുക്കുമ്പോൾ, ഇൻഡെപ്ത് നെറ്റ്വർക്ക് വിശകലനം സ്വാധീനമുള്ള സൃഷ്ടികൾ നിർണ്ണയിക്കുന്നതിലൂടെയും ഡ്രോണുകളുടെ കാർഷിക സാധ്യതകളെക്കുറിച്ചുള്ള തീമുകൾ വെളിപ്പെടുത്തുന്നതിലൂടെയും പുതിയ ഉൾക്കാഴ്ചകൾ നൽകുന്നുവെന്ന് ഞങ്ങൾ അഭിപ്രായപ്പെടുന്നു.
അതിനാൽ, ഇനിപ്പറയുന്ന ഗവേഷണ ലക്ഷ്യങ്ങൾ കൈവരിക്കാൻ ഞങ്ങൾ ശ്രമിക്കുന്നു:
- കാർഷിക മേഖലയിലെ ഡ്രോൺ ആപ്ലിക്കേഷനുകൾക്ക് മികച്ച സംഭാവനകളുള്ള സ്വാധീനമുള്ള പ്രസിദ്ധീകരണങ്ങളുടെ തിരിച്ചറിയൽ.
- സാഹിത്യത്തിൻ്റെ ക്ലസ്റ്ററിംഗ്, ഗവേഷണ കേന്ദ്രങ്ങളുടെ തിരിച്ചറിയൽ, കോ-സൈറ്റേഷൻ വിശകലനം ഉപയോഗിച്ച് സെമാൻ്റിക് സമാനതയെ അടിസ്ഥാനമാക്കിയുള്ള പ്രധാന 'ബൗദ്ധിക ഘടന' പഠനങ്ങളുടെ മാപ്പിംഗ്.
- ഈ മേഖലയിലെ വിവിധ പ്രസിദ്ധീകരണങ്ങൾക്കിടയിൽ കാലക്രമേണ ലിങ്കേജുകളുടെയും ഉദ്ധരണി ശൃംഖലകളുടെയും പരിണാമം മനസ്സിലാക്കുകയും ഭാവിയിലെ ഗവേഷണ ദിശകളും ചർച്ചാ വിഷയങ്ങളും തിരിച്ചറിയുകയും ചെയ്യുന്നു.
ബാക്കിയുള്ള പേപ്പറുകൾ ഇനിപ്പറയുന്ന രീതിയിൽ ക്രമീകരിച്ചിരിക്കുന്നു: വിഭാഗം 2 രീതിശാസ്ത്രത്തിൻ്റെയും ഡാറ്റാ ശേഖരണ ഘട്ടങ്ങളുടെയും രൂപരേഖ നൽകുന്നു; വിഭാഗം 3 വിശകലനങ്ങളുടെ ഫലങ്ങൾ നൽകുന്നു; കൂടാതെ സെക്ഷൻ 4 കണ്ടെത്തലുകളെ ചർച്ച ചെയ്യുകയും ഗവേഷണ സംഭാവനകൾ, പ്രത്യാഘാതങ്ങൾ, ഭാവി ദിശകൾ എന്നിവ ഉപയോഗിച്ച് അവസാനിപ്പിക്കുകയും ചെയ്യുന്നു.
മെത്തഡോളജി
ഈ നിലവിലെ ഗവേഷണ പഠനത്തിൽ, കൃഷിയിലെ ഡ്രോൺ ആപ്ലിക്കേഷനുകൾ പര്യവേക്ഷണം ചെയ്യുന്നതിനായി ഞങ്ങൾ ഒരു ബിബ്ലിയോമെട്രിക് വിശകലനം നടത്തുന്നു. ഈ അളവ് സമീപനം വിജ്ഞാന ഡൊമെയ്നിൻ്റെ (അറോറ & ചക്രബർത്തി, 2021) ബൗദ്ധിക ഘടനയും ഈ രീതി പ്രയോഗിച്ച് അന്വേഷിക്കാൻ കഴിയുന്ന നിലവിലെ നില, ചർച്ചാ വിഷയങ്ങൾ, ഭാവി ഗവേഷണ ദിശകൾ എന്നിവ വെളിപ്പെടുത്തുന്നു (കപൂർ et al., 2018; Mishra et al. , 2017; A. Rejeb, et al., 2021b; A. Rejeb et al., 2021). സാധാരണയായി, ഒരു ബിബ്ലിയോമെട്രിക് വിശകലനം രേഖാമൂലമുള്ള ആശയവിനിമയത്തിൻ്റെ മറഞ്ഞിരിക്കുന്ന പാറ്റേണുകളും സ്ഥിതിവിവരക്കണക്കുകളും ഗണിതശാസ്ത്ര രീതികളും അടിസ്ഥാനമാക്കിയുള്ള അച്ചടക്കത്തിൻ്റെ പരിണാമവും സംഗ്രഹിക്കാനും കണ്ടെത്താനും നിലവിലുള്ള സാഹിത്യത്തെ പരിശോധിക്കുന്നു, ഇത് വലിയ ഡാറ്റാ സെറ്റുകൾക്ക് ബാധകമാണ് (പ്രിച്ചാർഡ്, 2020; ചെറുത്, 1969; തായ് & റിഗ്സ്ബി , 1999). ബിബ്ലിയോമെട്രിക്സ് ഉപയോഗിക്കുന്നതിലൂടെ, സമാനതയെ അടിസ്ഥാനമാക്കി ഡൊമെയ്നിലേക്ക് സംഭാവന ചെയ്യുന്ന നിലവിലുള്ള മാതൃകകളും ഗവേഷണ കേന്ദ്രങ്ങളും നന്നായി മനസ്സിലാക്കാൻ ഞങ്ങൾ ആഗ്രഹിക്കുന്നു (തെൽവാൾ, 1998). ബിബ്ലിയോമെട്രിക്സ്, മെത്തഡോളജിയുടെ വസ്തുനിഷ്ഠമായ അളവ് ശക്തിയുടെ പിൻബലമുള്ള പുതിയ സ്ഥിതിവിവരക്കണക്കുകൾ നൽകുന്നു (Casillas & Acedo, 2008). കൃഷി, റിമോട്ട് സെൻസിംഗ്, ഡിജിറ്റൽ ട്രാൻസ്ഫോർമേഷൻ എന്നിവയുൾപ്പെടെയുള്ള അനുബന്ധ ഡൊമെയ്നുകളിൽ നിരവധി പണ്ഡിതന്മാർ മുമ്പ് ബിബ്ലിയോമെട്രിക് പഠനങ്ങൾ നടത്തിയിട്ടുണ്ട് (Armenta-Medina et al., 2007; Bouzembrak et al., 2020; A. Rejeb, Treiblmaier, et al., 2019; Wamba2021 & Queiroz, 2021; വാങ് et al., 2019).
ഉദ്ധരണി വിശകലനം
ഉദ്ധരണി വിശകലനം നൽകിയിരിക്കുന്ന ഗവേഷണ മേഖലയെക്കുറിച്ചുള്ള വിവിധ ഉൾക്കാഴ്ചകൾ വെളിപ്പെടുത്തുന്നു. ഒന്നാമതായി, തന്നിരിക്കുന്ന ഗവേഷണ മേഖലയിലേക്ക് സംഭാവന നൽകുകയും കാര്യമായ സ്വാധീനം ചെലുത്തുകയും ചെയ്യുന്ന ഏറ്റവും സ്വാധീനമുള്ള എഴുത്തുകാരെയും പ്രസിദ്ധീകരണങ്ങളെയും വെളിപ്പെടുത്താൻ ഇത് സഹായിക്കുന്നു (Gundolf & Filser, 2013). രണ്ടാമതായി, വിജ്ഞാന പ്രവാഹവും രചയിതാക്കൾ തമ്മിലുള്ള ആശയവിനിമയ ബന്ധങ്ങളും അനാവരണം ചെയ്യാൻ കഴിയും. അവസാനമായി, ഉദ്ധരിക്കപ്പെട്ടതും ഉദ്ധരിക്കുന്നതുമായ കൃതികൾ തമ്മിലുള്ള ബന്ധങ്ങൾ കണ്ടെത്തുന്നതിലൂടെ, കാലക്രമേണ ഒരു വിജ്ഞാന ഡൊമെയ്നിൻ്റെ മാറ്റങ്ങളും പരിണാമങ്ങളും പര്യവേക്ഷണം ചെയ്യാൻ ഒരാൾക്ക് കഴിയും (പൗർനേഡർ
et al., 2020). ഒരു പ്രസിദ്ധീകരണത്തിൻ്റെ ഉയർന്ന ഉദ്ധരണി നമ്പറുകൾ അതിൻ്റെ പ്രസക്തിയും ഗവേഷണ മേഖലയിലേക്കുള്ള ഗണ്യമായ സംഭാവനകളും പ്രതിഫലിപ്പിക്കുന്നു (ബാൾഡി, 1998; ഗൺഡോൾഫ് & ഫിൽസർ, 2013; മരിങ്കോ, 1998). പ്രസിദ്ധീകരണങ്ങളുടെ അവലംബ വിശകലനം പ്രസക്തമായ കൃതികളെ തിരിച്ചറിയാനും കാലക്രമേണ അവയുടെ ജനപ്രീതിയും പുരോഗതിയും ട്രാക്കുചെയ്യാനും സഹായിക്കുന്നു.
ഡോക്യുമെൻ്റ് കോ-സൈറ്റേഷൻ വിശകലനം
പ്രസിദ്ധീകരണങ്ങൾ തമ്മിലുള്ള ബന്ധം പര്യവേക്ഷണം ചെയ്യുന്നതിനും ഒരു ഫീൽഡിൻ്റെ ബൗദ്ധിക ഘടനയെ ചിത്രീകരിക്കുന്നതിനുമുള്ള ഒരു മൂല്യവത്തായ രീതിയാണ് കോ-സൈറ്റേഷൻ വിശകലനം (Nerur et al., 2008). മറ്റൊരു വിധത്തിൽ പറഞ്ഞാൽ, ഏറ്റവും കൂടുതൽ ഉദ്ധരിച്ച പ്രസിദ്ധീകരണങ്ങളും അവയുടെ ബന്ധങ്ങളും തിരിച്ചറിയുന്നതിലൂടെ, ഒരു ക്ലസ്റ്ററിലെ പ്രസിദ്ധീകരണങ്ങൾ സമാനമായ ആശയങ്ങൾ പതിവായി പങ്കിടുന്ന പ്രസിദ്ധീകരണങ്ങളെ വ്യത്യസ്ത ഗവേഷണ ക്ലസ്റ്ററുകളായി തരംതിരിക്കുന്നു (McCain, 1990; Small, 1973). പ്രസിദ്ധീകരണങ്ങളുടെ കണ്ടെത്തലുകൾ സാമ്യം എന്നല്ല അർത്ഥമാക്കുന്നത് എന്നത് നിർണായകമാണ്
യോജിച്ചതും പരസ്പരം യോജിക്കുന്നതും; വിഷയ സാമ്യം കാരണം പ്രസിദ്ധീകരണങ്ങൾ ഒരേ ക്ലസ്റ്ററിൽ പെടുന്നു, പക്ഷേ അവയ്ക്ക് പരസ്പര വിരുദ്ധമായ കാഴ്ചപ്പാടുകൾ ഉണ്ടാകാം.
ഡാറ്റ ശേഖരണവും വിശകലനവും
വൈറ്റ് ആൻഡ് ഗ്രിഫിത്ത് (1981) നിർദ്ദേശിച്ച രീതിശാസ്ത്രം പിന്തുടർന്ന്, കാർഷിക മേഖലയിലെ ഡ്രോൺ ആപ്ലിക്കേഷനുകളുടെ മുഴുവൻ ഗവേഷണ മേഖലയും ഉൾക്കൊള്ളുന്നതിനായി ഞങ്ങൾ ജേണൽ ലേഖനങ്ങളുടെ സമഗ്രമായ തിരയൽ നടത്തി, ഇനിപ്പറയുന്ന അഞ്ച് ഘട്ടങ്ങൾ പിന്തുടർന്ന്:
- വിവരശേഖരണമായിരുന്നു ആദ്യപടി. സ്റ്റാൻഡേർഡ് ഫലങ്ങളുള്ള ഏറ്റവും സമഗ്രവും വിശ്വസനീയവുമായ ഡാറ്റാബേസുകളിൽ ഒന്നായി സ്കോപ്പസ് തിരഞ്ഞെടുത്തു. കാർഷിക മേഖലയിലെ എല്ലാ ഡ്രോൺ ആപ്ലിക്കേഷനുകളുമായി ബന്ധപ്പെട്ട പ്രസിദ്ധീകരണങ്ങളുടെ മെറ്റാ-ഡാറ്റ വീണ്ടെടുത്തു. തുടർന്ന് ഞങ്ങൾ തിരഞ്ഞെടുത്ത ലേഖനങ്ങൾ വിശകലനം ചെയ്തു, വിശകലനത്തിൽ നിന്ന് വിഷയമല്ലാത്ത ലേഖനങ്ങൾ നീക്കം ചെയ്തു.
- ഞങ്ങൾ സാഹിത്യം വിശകലനം ചെയ്യുകയും ഗവേഷണ മേഖലയിൽ ഉപയോഗിക്കുന്ന ഏറ്റവും പ്രധാനപ്പെട്ട കീവേഡുകൾ തിരിച്ചറിയുകയും ചെയ്തു.
- ഉദ്ധരണി വിശകലനം ഉപയോഗിച്ച്, അടിസ്ഥാന ഉദ്ധരണി പാറ്റേണുകൾ വെളിപ്പെടുത്തുന്നതിന് രചയിതാക്കളും പ്രമാണങ്ങളും തമ്മിലുള്ള ബന്ധം ഞങ്ങൾ പര്യവേക്ഷണം ചെയ്തു. കാർഷിക ഡ്രോണുകളുടെ മേഖലയിൽ കാര്യമായ സംഭാവനകൾ നൽകിയിട്ടുള്ള ഏറ്റവും സ്വാധീനമുള്ള എഴുത്തുകാരെയും പ്രസിദ്ധീകരണങ്ങളെയും ഞങ്ങൾ തിരിച്ചറിഞ്ഞു.
- സമാന പ്രസിദ്ധീകരണങ്ങളെ ക്ലസ്റ്ററുകളായി തരംതിരിക്കാൻ ഞങ്ങൾ ഒരു കോ-സൈറ്റേഷൻ വിശകലനം നടത്തി.
- അവസാനമായി, സഹകരണ ശൃംഖലയെ ചിത്രീകരിക്കുന്നതിന് രാജ്യങ്ങളും സ്ഥാപനങ്ങളും ജേണലുകളും തമ്മിലുള്ള ബന്ധങ്ങളും ബന്ധങ്ങളും ഞങ്ങൾ വിശകലനം ചെയ്തു.
ഉചിതമായ തിരയൽ പദങ്ങളുടെ തിരിച്ചറിയൽ
ഡാറ്റ സമാഹരണത്തിനായി ഞങ്ങൾ ഇനിപ്പറയുന്ന തിരയൽ സ്ട്രിംഗുകൾ പ്രയോഗിച്ചു: (ഡ്രോൺ* അല്ലെങ്കിൽ “ആളില്ലാത്ത ആകാശ വാഹനം” അല്ലെങ്കിൽ uav* അല്ലെങ്കിൽ “ആളില്ലാത്ത എയർക്രാഫ് സിസ്റ്റം”അല്ലെങ്കിൽ അമേരിക്ക അല്ലെങ്കിൽ "വിദൂരമായി പൈലറ്റ് ചെയ്ത വിമാനം”) കൂടാതെ (കാർഷിക അല്ലെങ്കിൽ കൃഷി അല്ലെങ്കിൽ കൃഷി അല്ലെങ്കിൽ കർഷകൻ). 2021 സെപ്റ്റംബറിലാണ് തിരച്ചിൽ നടത്തിയത്. UAV, UAS, റിമോട്ട് പൈലറ്റഡ് എയർക്രാഫ്റ്റ് (Sah et al., 2021) എന്നിവയുൾപ്പെടെ ഡ്രോണുകൾക്ക് നിരവധി പദവികളുണ്ട്. അബ്ദുള്ളാഹി തുടങ്ങിയവരുടെ പഠനത്തെ അടിസ്ഥാനമാക്കിയാണ് കൃഷിയുമായി ബന്ധപ്പെട്ട പ്രത്യേക തിരയൽ പദങ്ങൾ തിരിച്ചറിഞ്ഞത്. (2021). വ്യക്തതയ്ക്കും സുതാര്യതയ്ക്കും വേണ്ടി, ഞങ്ങൾ ഉപയോഗിച്ച കൃത്യമായ അന്വേഷണം അനുബന്ധം 1-ൽ നൽകിയിരിക്കുന്നു. ഒരു ഡാറ്റ ക്ലീനിംഗ് പ്രക്രിയയ്ക്ക് ശേഷം, ഞങ്ങൾ ഒരു ടെക്സ്റ്റ് ഫയൽ സൃഷ്ടിച്ചു, അത് പിന്നീട് ഉദ്ധരണികൾക്കും കോ-സൈറ്റേഷൻ വിശകലനത്തിനുമുള്ള ഒരു പൊതു ഉപകരണമായ BibExcel-ലേക്ക് ലോഡ് ചെയ്തു. ഈ ടൂൾ മറ്റ് സോഫ്റ്റ്വെയറുകളുമായുള്ള ലളിതമായ ഇടപെടൽ വാഗ്ദാനം ചെയ്യുന്നു കൂടാതെ ഡാറ്റ കൈകാര്യം ചെയ്യുന്നതിനും വിശകലനം ചെയ്യുന്നതിനും കാര്യമായ സ്വാതന്ത്ര്യം പ്രദാനം ചെയ്യുന്നു. കണ്ടെത്തലുകൾ ദൃശ്യവൽക്കരിക്കുന്നതിനും ബിബ്ലിയോമെട്രിക് നെറ്റ്വർക്കുകൾ സൃഷ്ടിക്കുന്നതിനും VOSviewer പതിപ്പ് 1.6.16 ഉപയോഗിച്ചു (Eck & Waltman, 2009). VOSviewer അവബോധജന്യമായ ദൃശ്യവൽക്കരണത്തിൻ്റെ ഒരു ശ്രേണി വാഗ്ദാനം ചെയ്യുന്നു, പ്രത്യേകിച്ചും ബിബ്ലിയോമെട്രിക് മാപ്പുകൾ വിശകലനം ചെയ്യുന്നതിന് (Geng et al., 2020). കൂടാതെ, ഫലങ്ങൾ നന്നായി മനസ്സിലാക്കാൻ സഹായിക്കുന്ന പ്ലെയിൻ വിഷ്വൽ ഫലങ്ങൾ നൽകുന്നതിന് ഇത് സഹായിക്കുന്നു (അബ്ദുള്ളാഹി et al., 2021). മുകളിൽ പ്രസ്താവിച്ചതുപോലെ തിരയൽ സ്ട്രിംഗുകൾ പ്രയോഗിച്ച്, പ്രസക്തമായ എല്ലാ പ്രസിദ്ധീകരണങ്ങളും ഞങ്ങൾ ശേഖരിക്കുകയും സംഭരിക്കുകയും ചെയ്തു. ആദ്യ സെർച്ച് ഫലങ്ങളിൽ ആകെ 5,085 ഡോക്യുമെൻ്റുകൾ ലഭിച്ചു. തിരഞ്ഞെടുത്ത സാമ്പിളിൻ്റെ ഗുണനിലവാരം ഉറപ്പാക്കാൻ, പിയർ-റിവ്യൂ ചെയ്ത ജേണൽ ലേഖനങ്ങൾ മാത്രമേ ഗവേഷണത്തിൽ പരിഗണിച്ചിട്ടുള്ളൂ, അതിൻ്റെ ഫലമായി പുസ്തകങ്ങൾ, അധ്യായങ്ങൾ, കോൺഫറൻസ് നടപടിക്രമങ്ങൾ, എഡിറ്റോറിയൽ കുറിപ്പുകൾ എന്നിവ പോലുള്ള മറ്റ് ഡോക്യുമെൻ്റ് തരങ്ങൾ ഒഴിവാക്കപ്പെട്ടു. ഒരു സ്ക്രീനിംഗ് പ്രക്രിയയിൽ, അപ്രസക്തമായ (അതായത്, ഈ സൃഷ്ടിയുടെ പരിധിക്കപ്പുറമുള്ളത്), അനാവശ്യമായ (അതായത്, ഇരട്ട സൂചികയിൽ നിന്ന് ഉത്ഭവിക്കുന്ന തനിപ്പകർപ്പുകൾ), കൂടാതെ ഇംഗ്ലീഷ് സംസാരിക്കാത്ത പ്രസിദ്ധീകരണങ്ങൾ ഫിൽട്ടർ ചെയ്തു. ഈ പ്രക്രിയ അന്തിമ വിശകലനത്തിൽ 4,700 രേഖകൾ ഉൾപ്പെടുത്തുന്നതിന് കാരണമായി.
കണ്ടെത്തലുകളും ചർച്ചകളും
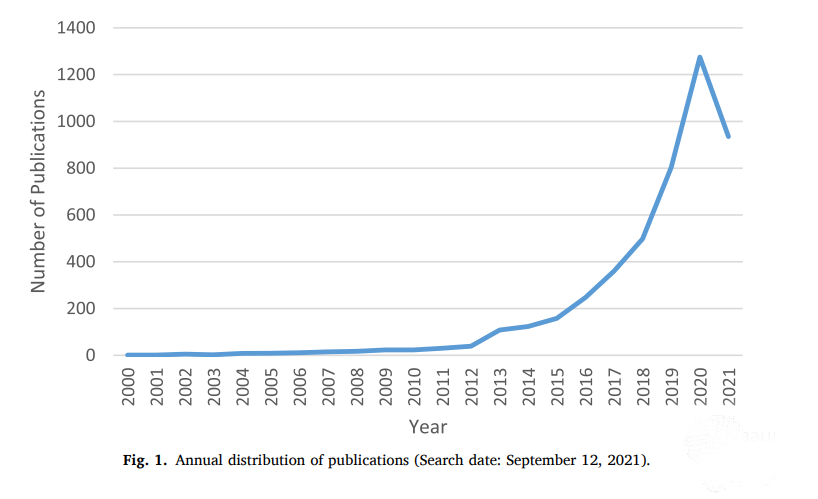
ആരംഭിക്കുന്നതിന്, കാർഷിക ഡ്രോണുകളെക്കുറിച്ചുള്ള നിലവിലെ സാഹിത്യത്തിലെ പ്രസിദ്ധീകരണ ഉൽപാദനത്തിലെ സംഭവവികാസങ്ങൾ ഞങ്ങൾ വിശകലനം ചെയ്തു. പണ്ഡിത ഗവേഷണത്തിൻ്റെ താൽക്കാലിക വിതരണം ചിത്രം 1 ൽ കാണിച്ചിരിക്കുന്നു. 2011 മുതൽ (30 പ്രസിദ്ധീകരണങ്ങൾ) പ്രസിദ്ധീകരണങ്ങളിൽ ദ്രുതഗതിയിലുള്ള വർദ്ധനവ് ഞങ്ങൾ കാണുന്നു; അതിനാൽ, വിശകലന കാലയളവിനെ രണ്ട് വ്യത്യസ്ത ഘട്ടങ്ങളായി വിഭജിക്കാൻ ഞങ്ങൾ തീരുമാനിച്ചു. 1990 നും 2010 നും ഇടയിലുള്ള കാലഘട്ടത്തെ ബിൽഡ്-അപ്പ് ഘട്ടമായി ഞങ്ങൾ പരാമർശിക്കുന്നു, അതിൽ പ്രതിവർഷം ഏകദേശം ഏഴ് പേപ്പറുകൾ പ്രസിദ്ധീകരിക്കുന്നു. 2010-ന് ശേഷമുള്ള കാലഘട്ടത്തെ വളർച്ചാ ഘട്ടം എന്ന് വിളിക്കുന്നു, കാരണം ഈ കാലയളവിൽ കാർഷിക മേഖലയിലെ ഡ്രോൺ ആപ്ലിക്കേഷനുകളെക്കുറിച്ചുള്ള ഗവേഷണം ഗണ്യമായ കുതിച്ചുചാട്ടത്തിന് സാക്ഷ്യം വഹിച്ചു. 2010 ന് ശേഷം, വർദ്ധിച്ചുവരുന്ന പ്രസിദ്ധീകരണങ്ങളുടെ എണ്ണം ഗവേഷകർക്കിടയിൽ വർദ്ധിച്ചുവരുന്ന താൽപ്പര്യം സ്ഥിരീകരിക്കുന്നു, ഇത് റിമോട്ട് സെൻസിംഗിൽ ഡ്രോണുകൾ പ്രയോഗിക്കുകയും കൃത്യമായ കൃഷിയിൽ ഉപയോഗിക്കുകയും ചെയ്തു എന്നതും പ്രതിഫലിപ്പിക്കുന്നു (Deng et al., 2018; Maes & Steppe, 2019; Messina & Modica, 2020 ). പ്രത്യേകിച്ചും, പ്രസിദ്ധീകരണങ്ങളുടെ എണ്ണം 108-ൽ 2013 ആയിരുന്നത് 498-ൽ 2018 ആയി ഉയർന്നു, 1,275-ൽ 2020 ആയി ഉയർന്നു. 935 ജനുവരി മുതൽ സെപ്റ്റംബർ പകുതി വരെ മൊത്തം 2021 ലേഖനങ്ങൾ പ്രസിദ്ധീകരിച്ചു. തുടർന്ന്, വളർച്ചാ ഘട്ടത്തിൽ കൂടുതൽ വിശകലനം ചെയ്യാൻ ഞങ്ങൾ തീരുമാനിച്ചു. ഈ കാലഘട്ടം കാർഷിക ഡ്രോണുകളുടെ ഏറ്റവും പുതിയതും പ്രധാനപ്പെട്ടതുമായ സൂക്ഷ്മതകളെ പ്രതിഫലിപ്പിക്കുന്നു.
കീവേഡുകൾ വിശകലനം
ഒരു പ്രസിദ്ധീകരണത്തിനായി രചയിതാക്കൾ തിരഞ്ഞെടുക്കുന്ന കീവേഡുകൾ, പേപ്പറിനെ എങ്ങനെ പ്രതിനിധീകരിക്കുന്നു, ശാസ്ത്ര സമൂഹങ്ങളിൽ അത് എങ്ങനെ ആശയവിനിമയം നടത്തുന്നു എന്നതിൽ നിർണായക സ്വാധീനം ചെലുത്തുന്നു. അവർ ഗവേഷണത്തിൻ്റെ പ്രധാന വിഷയങ്ങൾ തിരിച്ചറിയുകയും തഴച്ചുവളരാനോ പരാജയപ്പെടാനോ ഉള്ള അതിൻ്റെ സാധ്യത നിർണ്ണയിക്കുന്നു (Day & Gastel, 1998.; Kim et al., 2016; Uddin et al., 2015). കീവേഡ് വിശകലനം, വിശാലമായ ഗവേഷണ പ്രവണതകളും ദിശകളും വെളിപ്പെടുത്തുന്നതിനുള്ള ഒരു ടൂൾ, ഒരു ഡൊമെയ്നിലെ എല്ലാ അനുബന്ധ പ്രസിദ്ധീകരണങ്ങളുടെയും കീവേഡുകളുടെ സമാഹാരത്തെ സൂചിപ്പിക്കുന്നു (ദീക്ഷിത് & ജാഖർ, 2021). നിലവിലെ പഠനത്തിൽ, ഏറ്റവും ജനപ്രിയമായ വിഷയങ്ങൾ പര്യവേക്ഷണം ചെയ്യുന്നതിനായി ഞങ്ങൾ സമാഹരിച്ച കീവേഡുകളെ രണ്ട് സെറ്റുകളായി (അതായത്, 2010, 2011–2021 വരെ) വിഭജിച്ചു. ഇത് ചെയ്യുന്നതിലൂടെ, രണ്ട് സെറ്റുകളിലെയും നിർണായക കീവേഡുകൾ കണ്ടെത്താനും ആവശ്യമായ എല്ലാ ഡാറ്റയും ഞങ്ങൾ പിടിച്ചെടുത്തുവെന്ന് ഉറപ്പുനൽകാനും കഴിയും. ഓരോ സെറ്റിനും, മികച്ച പത്ത് കീവേഡുകൾ പട്ടിക 3-ൽ അവതരിപ്പിച്ചിരിക്കുന്നു. "ഡ്രോൺ", "ഡ്രോണുകൾ" അല്ലെങ്കിൽ സമാനമായി "ഇൻ്റർനെറ്റ് ഓഫ് തിംഗ്സ്", "ഐഒടി" എന്നിവ പോലെയുള്ള അർത്ഥപരമായി സമാനമായ കീവേഡുകൾ സംയോജിപ്പിച്ച് ഞങ്ങൾ പൊരുത്തക്കേടുകൾ ഇല്ലാതാക്കി.
രണ്ട് കാലഘട്ടങ്ങളിലും "ഡ്രോൺ", "ആളില്ലാത്ത ഏരിയൽ സിസ്റ്റം" എന്നിവയുമായി താരതമ്യപ്പെടുത്തുമ്പോൾ "ആളില്ലാത്ത ആകാശ വാഹനം" എന്നത് പതിവായി ഉപയോഗിക്കുന്ന കീവേഡാണെന്ന് പട്ടിക 3 കാണിക്കുന്നു. കൂടാതെ, "റിമോട്ട് സെൻസിംഗ്", "പ്രിസിഷൻ അഗ്രികൾച്ചർ", "അഗ്രികൾച്ചർ" എന്നിവ രണ്ട് കാലഘട്ടങ്ങളിലും ഉയർന്ന റാങ്ക് നേടിയിട്ടുണ്ട്. ആദ്യ കാലഘട്ടത്തിൽ, "പ്രിസിഷൻ അഗ്രികൾച്ചർ" അഞ്ചാം സ്ഥാനത്തെത്തി, രണ്ടാം കാലയളവിൽ ഇത് രണ്ടാം സ്ഥാനത്തെത്തി, ഇത് സൂക്ഷ്മമായ കൃഷി നേടുന്നതിൽ ഡ്രോണുകൾ എങ്ങനെ പ്രാധാന്യമർഹിക്കുന്നു എന്ന് വ്യക്തമാക്കുന്നു.
മറ്റ് റിമോട്ട് സെൻസിംഗ്, ഗ്രൗണ്ട് അധിഷ്ഠിത സംവിധാനങ്ങളുമായി താരതമ്യപ്പെടുത്തുമ്പോൾ കണ്ടെത്തൽ, എസ്റ്റിമേഷൻ സമ്പ്രദായങ്ങൾ വേഗമേറിയതും വിലകുറഞ്ഞതും എളുപ്പത്തിൽ നിർവഹിക്കാൻ കഴിയുന്നതുമാണ്. കൂടാതെ, ആവശ്യമുള്ളപ്പോൾ അവർക്ക് കൃത്യമായ അളവിൽ ഇൻപുട്ട് (ഉദാ, വെള്ളം അല്ലെങ്കിൽ കീടനാശിനികൾ) തളിക്കാൻ കഴിയും (Guo et al., 2020; Inoue, 2020; Panday, Pratihast, et al., 2020).
ഏറ്റവും കൂടുതൽ ഉപയോഗിക്കുന്ന കീവേഡുകളുടെ ലിസ്റ്റ്.
റാങ്ക് | 1990-2010 | ഇല്ല സംഭവങ്ങൾ | 2011-2021 | ഇല്ല സംഭവങ്ങൾ |
| 1 | ആളില്ലാ ആകാശം വാഹനം | 28 | ആളില്ലാത്ത ആകാശ വാഹനം | 1628 |
| 2 | വിദൂര സംവേദനം | 7 | സൂക്ഷ്മമായത് കാർഷിക | 489 |
| 3 | കാർഷിക | 4 | വിദൂര സംവേദനം | 399 |
| 4 | വായുവിലൂടെ | 4 | ഡ്രോൺ | 374 |
| 5 | സൂക്ഷ്മമായത് കാർഷിക | 4 | ആളില്ലാത്ത ഏരിയൽ സിസ്റ്റം | 271 |
| 6 | ആളില്ലാ ആകാശം | 4 | കാർഷിക | 177 |
| 7 | ഹൈപ്പർസ്പെക്ട്രൽ സെൻസർ | 3 | ആഴത്തിലുള്ള പഠനം | 151 |
| 8 | കൃത്രിമ ന്യൂറൽ നെറ്റ്വർക്കുകൾ | 2 | മെഷീൻ പഠന | 149 |
| 9 | സ്വയംഭരണ വിമാനം | 2 | സസ്യങ്ങൾ സൂചിക | 142 |
| 10 | കോഫി | 2 | ഇൻ്റർനെറ്റ് ഓഫ് കാര്യങ്ങൾ | 124 |
കോംപ്ലിമെൻ്ററി ടെക്നോളജികളുടെ സാന്നിധ്യമാണ് മറ്റൊരു രസകരമായ സവിശേഷത. ആദ്യ ഘട്ടത്തിൽ, "ഹൈപ്പർസ്പെക്ട്രൽ സെൻസർ", "ആർട്ടിഫിഷ്യൽ ന്യൂറൽ നെറ്റ്വർക്കുകൾ" (ANN) എന്നിവ മികച്ച പത്ത് കീവേഡുകളിൽ ഉൾപ്പെടുന്നു. ഹൈപ്പർസ്പെക്ട്രൽ ഇമേജിംഗ് പരമ്പരാഗത ഇമേജിംഗിൽ വിപ്ലവം സൃഷ്ടിച്ചു, വിവിധ തരംഗദൈർഘ്യങ്ങളിൽ ധാരാളം ചിത്രങ്ങൾ ശേഖരിച്ചു. അങ്ങനെ ചെയ്യുമ്പോൾ, മൾട്ടിസ്പെക്ട്രൽ ഇമേജിംഗ്, സ്പെക്ട്രോസ്കോപ്പി, RGB ഇമേജറി (Adao ˜ et al., എന്നിവയെ അപേക്ഷിച്ച് സെൻസറുകൾക്ക് ഒരേസമയം മികച്ച സ്പേഷ്യൽ, സ്പെക്ട്രൽ വിവരങ്ങൾ ശേഖരിക്കാനാകും.
2017). ആദ്യ ഘട്ടത്തിൽ "എഎൻഎൻ", രണ്ടാമത്തേതിൽ "ഡീപ് ലേണിംഗ്" (ഡിഎൽ), "മെഷീൻ ലേണിംഗ്" (എംഎൽ) എന്നിവ സൂചിപ്പിക്കുന്നത്, പ്രസിദ്ധീകരിച്ച മിക്ക കൃതികളും ഡ്രോൺ-നുള്ള AI സാങ്കേതികതകളുടെ സാധ്യത പരിശോധിക്കുന്നതിലാണ് ശ്രദ്ധ കേന്ദ്രീകരിച്ചിരിക്കുന്നത് എന്നാണ്. അടിസ്ഥാനമാക്കിയുള്ള കൃഷി. ഡ്രോണുകൾക്ക് സ്വയമേവ പറക്കാൻ കഴിയുമെങ്കിലും, അവയ്ക്ക് ഇപ്പോഴും ഒരു പൈലറ്റിൻ്റെ ഇടപെടൽ ആവശ്യമാണ്, ഇത് ഉപകരണ ബുദ്ധിയുടെ താഴ്ന്ന നിലയെ സൂചിപ്പിക്കുന്നു. എന്നിരുന്നാലും, മികച്ച സാഹചര്യ ബോധവും സ്വയംഭരണ തീരുമാന പിന്തുണയും നൽകാൻ കഴിയുന്ന AI സാങ്കേതിക വിദ്യകളുടെ പുരോഗതി കാരണം ഈ പ്രശ്നം പരിഹരിക്കാൻ കഴിയും. AI കൊണ്ട് സജ്ജീകരിച്ചിരിക്കുന്ന ഡ്രോണുകൾക്ക് നാവിഗേഷൻ സമയത്ത് കൂട്ടിയിടികൾ ഒഴിവാക്കാനും മണ്ണും വിള പരിപാലനവും മെച്ചപ്പെടുത്താനും കഴിയും (Inoue, 2020), കൂടാതെ മനുഷ്യർക്ക് അധ്വാനവും സമ്മർദ്ദവും കുറയ്ക്കാൻ കഴിയും (BK ശർമ്മ et al., 2019).
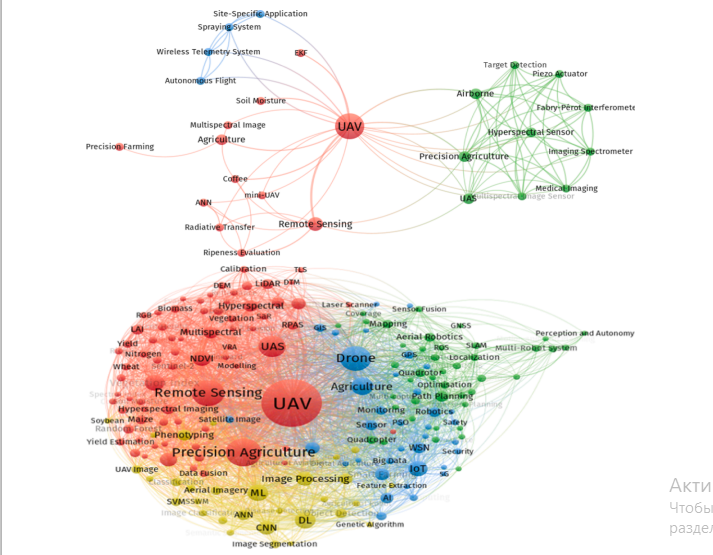
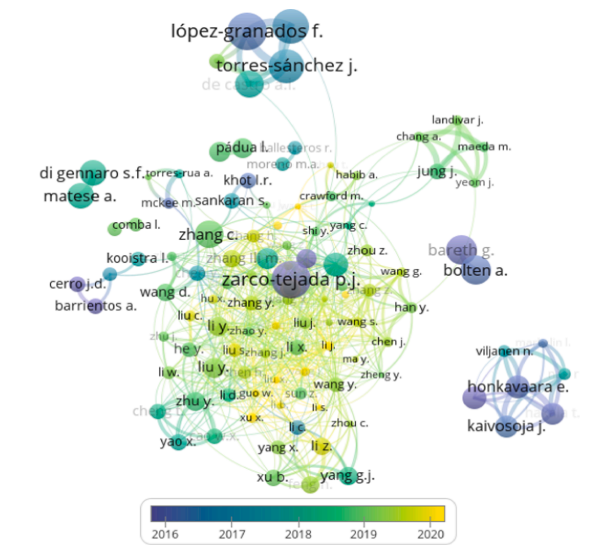
അവയുടെ വഴക്കവും വലിയ അളവിലുള്ള നോൺ-ലീനിയർ ഡാറ്റ കൈകാര്യം ചെയ്യാനുള്ള കഴിവും കാരണം, ഡ്രോണുകളും മറ്റ് റിമോട്ട് സെൻസിംഗ്, ഗ്രൗണ്ട് അധിഷ്ഠിത സംവിധാനങ്ങളും പ്രവചിക്കാനും തീരുമാനമെടുക്കാനും കൈമാറുന്ന ഡാറ്റ വിശകലനം ചെയ്യുന്നതിനുള്ള അനുയോജ്യമായ രീതികളാണ് AI ടെക്നിക്കുകൾ (Ali et al., 2015; Inoue, 2020). കൂടാതെ, രണ്ടാം കാലഘട്ടത്തിലെ "IoT" യുടെ സാന്നിധ്യം കാർഷികമേഖലയിൽ അതിൻ്റെ ഉയർന്നുവരുന്ന പങ്കിനെ സൂചിപ്പിക്കുന്നു. ഡ്രോണുകൾ, എംഎൽ, ഡിഎൽ, ഡബ്ല്യുഎസ്എൻ, ബിഗ് ഡാറ്റ എന്നിവയുൾപ്പെടെയുള്ള മറ്റ് സാങ്കേതികവിദ്യകൾ പരസ്പരം ബന്ധിപ്പിച്ചുകൊണ്ട് ഐഒടി കാർഷികരംഗത്ത് വിപ്ലവം സൃഷ്ടിക്കുകയാണ്. IoT നടപ്പിലാക്കുന്നതിൻ്റെ പ്രധാന നേട്ടങ്ങളിലൊന്ന്, വിവിധ ജോലികൾ (ഡാറ്റ ഏറ്റെടുക്കൽ, ഡാറ്റ വിശകലനം, പ്രോസസ്സിംഗ്, തീരുമാനമെടുക്കൽ, നടപ്പിലാക്കൽ) കാര്യക്ഷമമായും ഫലപ്രദമായും ലയിപ്പിക്കാനുള്ള കഴിവാണ് (ഏലിജ et al., 2018; Feng et al. , 2019; Muangprathub et al., 2019). കൂടാതെ, സസ്യങ്ങളുടെ ഓജസ്സും സസ്യ ഗുണങ്ങളും കണക്കാക്കുന്നതിന് ആവശ്യമായ ഡാറ്റ ക്യാപ്ചർ ചെയ്യുന്നതിനുള്ള കാര്യക്ഷമമായ ഉപകരണങ്ങളായി ഡ്രോണുകളെ കണക്കാക്കുന്നു (കാൻഡിയാഗോ et al., 2015). ചിത്രം 2a, 2b എന്നിവ രണ്ട് സമയ കാലയളവിലെയും കീവേഡ് കോ-ഓക്റൻസ് നെറ്റ്വർക്കുകളെ ചിത്രീകരിക്കുന്നു.
സ്വാധീനമുള്ള എഴുത്തുകാർ
ഈ വിഭാഗത്തിൽ, ഞങ്ങൾ സ്വാധീനമുള്ള രചയിതാക്കളെ നിർണ്ണയിക്കുകയും രചയിതാക്കളുടെ ഉദ്ധരണി ശൃംഖലകൾക്ക് നിലവിലെ സാഹിത്യത്തെ എങ്ങനെ ദൃശ്യവൽക്കരിക്കാനും ക്രമീകരിക്കാനും കഴിയുമെന്ന് പരിശോധിക്കുന്നു. ഏറ്റവും കൂടുതൽ ഉദ്ധരണികളുള്ള എല്ലാ ഗവേഷകരുടെയും കാലക്രമത്തിലുള്ള ഓവർലേ ചിത്രം 3 കാണിക്കുന്നു. വർണ്ണ സ്കെയിൽ രചയിതാക്കളുടെ ഉദ്ധരണികളുടെ വർഷം തിരിച്ചുള്ള വ്യതിയാനത്തെ പ്രതിഫലിപ്പിക്കുന്നു. കുറഞ്ഞത് 50 ഉദ്ധരണികളുടെയും പത്ത് പ്രസിദ്ധീകരണങ്ങളുടെയും പരിധി ഉപയോഗിച്ച് കാർഷിക ഡ്രോണുകളെക്കുറിച്ചുള്ള പഠനങ്ങൾ പ്രസിദ്ധീകരിച്ച ഗവേഷകരുടെ ഉദ്ധരണി ഘടന ഞങ്ങൾ പരിശോധിക്കുന്നു. പുറത്ത്
12,891 രചയിതാക്കൾ, 115 പേർ മാത്രമാണ് ഈ വ്യവസ്ഥ പാലിക്കുന്നത്. പരമാവധി എണ്ണം ഉദ്ധരണികൾ അനുസരിച്ച് അടുക്കിയ, സ്വാധീനമുള്ള പത്ത് എഴുത്തുകാരെ പട്ടിക 4 പട്ടികപ്പെടുത്തുന്നു. ലോപ്പസ്- ഗ്രാനഡോസ് എഫ്. 1,963 ഉദ്ധരണികളുമായി പട്ടികയിൽ മുന്നിലാണ്, 1,909 അവലംബങ്ങളുമായി സാർകോ-തേജഡ പി.ജെ.
ഏറ്റവും കൂടുതൽ ഉദ്ധരിക്കപ്പെട്ട എഴുത്തുകാരുടെ പട്ടിക.
| റാങ്കിങ് | രചയിതാവ് | ഉദ്ധരണികൾ |
| 1 | ലോപ്പസ്-ഗ്രനാഡോസ് എഫ്. | 1,963 |
| 2 | സർക്കോ-തേജഡ പി.ജെ | 1,909 |
| 3 | പെന ˜ ജെഎം | 1,644 |
| 4 | ടോറസ്-എസ്´ ആഞ്ചസ് ജെ. | 1,576 |
| 5 | ഫെറസ് ഇ | 1,339 |
| 6 | റെമോണ്ടിനോ എഫ് | 1,235 |
| 7 | ബോൾട്ടൻ എ | 1,160 |
| 8 | ബരെത്ത് ജി | 1,155 |
| 9 | ബേണി ജെഎ | 1,132 |
| 10 | ഡി കാസ്ട്രോ AI | 1,036 |
വ്യക്തിഗത പ്രസിദ്ധീകരണങ്ങളുടെ കാര്യം വരുമ്പോൾ, പ്രിസിഷൻ അഗ്രികൾച്ചറിൽ പ്രസിദ്ധീകരിച്ച ഏറ്റവും കൂടുതൽ ഉദ്ധരിക്കപ്പെട്ട പഠനമാണ് Zhang and Kovacs (2012) ലേഖനം. ഇവിടെ, രചയിതാക്കൾ കൃത്യമായ കൃഷിയിൽ യുഎഎസിൻ്റെ പ്രയോഗം അവലോകനം ചെയ്തു. കർഷകർക്ക് വിശ്വസനീയമായ അന്തിമ ഉൽപ്പന്നങ്ങൾ നൽകുന്നതിന് പ്ലാറ്റ്ഫോം ഡിസൈൻ, നിർമ്മാണം, ഇമേജ് ജിയോറഫറൻസിംഗിൻ്റെ സ്റ്റാൻഡേർഡൈസേഷൻ, വിവരങ്ങൾ വീണ്ടെടുക്കൽ വർക്ക്ഫ്ലോ എന്നിവ മുന്നോട്ട് കൊണ്ടുപോകേണ്ടതുണ്ടെന്ന് അവരുടെ ഗവേഷണത്തിൻ്റെ കണ്ടെത്തലുകൾ സൂചിപ്പിക്കുന്നു. കൂടാതെ, കർഷകനെ കൂടുതൽ ശക്തമായി ഇടപഴകാൻ അവർ ശുപാർശ ചെയ്യുന്നു, പ്രത്യേകിച്ച് ഫീൽഡ് പ്ലാനിംഗ്, ഇമേജ് ക്യാപ്ചർ, ഡാറ്റ വ്യാഖ്യാനം, വിശകലനം എന്നിവയിൽ. പ്രധാനമായും, ഫീൽഡ് മാപ്പിംഗ്, വീർ മാപ്പിംഗ്, കെമിക്കൽ ഉള്ളടക്കം അളക്കൽ, സസ്യങ്ങളുടെ സമ്മർദ്ദ നിരീക്ഷണം, സസ്യവളർച്ചയിൽ രാസവളങ്ങളുടെ സ്വാധീനം എന്നിവയിൽ UAV യുടെ പ്രാധാന്യം കാണിക്കുന്ന ആദ്യ പഠനങ്ങളിലൊന്നാണ് ഈ പഠനം. സാങ്കേതികവിദ്യയുമായി ബന്ധപ്പെട്ട വെല്ലുവിളികളിൽ നിരോധിത ചെലവുകൾ, സെൻസർ ശേഷി, പ്ലാറ്റ്ഫോം സ്ഥിരതയും വിശ്വാസ്യതയും, സ്റ്റാൻഡേർഡൈസേഷൻ്റെ അഭാവം, വൻതോതിലുള്ള ഡാറ്റ വിശകലനം ചെയ്യുന്നതിനുള്ള സ്ഥിരമായ നടപടിക്രമം എന്നിവയും ഉൾപ്പെടുന്നു.
ഉദ്ധരണി വിശകലനം
ഉദ്ധരണി വിശകലനം എന്നത് ലേഖനങ്ങളുടെ സ്വാധീനത്തെക്കുറിച്ചുള്ള പഠനത്തെ പ്രതിനിധീകരിക്കുന്നു, ഒഴുക്കിന് സാധ്യതയുള്ളതാണെങ്കിലും (ഉദാഹരണത്തിന്, ഉദ്ധരണി പക്ഷപാതം, സ്വയം അവലംബം) ആഘാത മൂല്യനിർണ്ണയത്തിനുള്ള അടിസ്ഥാന ഉപകരണങ്ങളിലൊന്നായി കണക്കാക്കപ്പെടുന്നു (Osareh, 1996; A. Rejeb et al., 2022; സാർലി et al., 2010). ഒരു പ്രത്യേക വിഷയത്തിൽ സാഹിത്യത്തിന് പേപ്പറുകൾ നൽകിയ സംഭാവനകളുടെ പ്രാധാന്യവും ചൈതന്യവും ഉദ്ധരണികൾ പ്രതിഫലിപ്പിക്കുന്നു (ആർ. ശർമ്മ et al., 2022). കാർഷിക ഡ്രോണുകളെക്കുറിച്ചുള്ള ഏറ്റവും സ്വാധീനമുള്ള പഠനങ്ങൾ നിർണ്ണയിക്കാൻ ഞങ്ങൾ ഒരു ഉദ്ധരണി വിശകലനം നടത്തുകയും ഉള്ളടക്കങ്ങൾ സംഗ്രഹിക്കുകയും ചെയ്തു. 5-1990, 2010-2011 കാലഘട്ടങ്ങളിലെ ഏറ്റവും സ്വാധീനമുള്ള പതിനഞ്ച് പേപ്പറുകളുടെ പട്ടിക പട്ടിക 2021 അവതരിപ്പിക്കുന്നു. ബെർണി തുടങ്ങിയവരുടെ ലേഖനങ്ങൾ. (2009)b, Austin (2010) എന്നിവ 1990-ലും 2010-ലും യഥാക്രമം 831 ഉം 498 ഉം ഉദ്ധരണികളോടെ ഉദ്ധരിക്കപ്പെട്ടു. ബേണി et al. (2009)b, താങ്ങാനാവുന്ന വിലയുള്ള തെർമൽ, നാരോബാൻഡ് മൾട്ടിസ്പെക്ട്രൽ ഇമേജിംഗ് സെൻസറുകൾ കൊണ്ട് സജ്ജീകരിച്ചിട്ടുള്ള ഒരു ഹെലികോപ്റ്റർ അധിഷ്ഠിത യുഎവി വഴി ക്വാണ്ടിറ്റേറ്റീവ് റിമോട്ട്സെൻസിംഗ് ഉൽപ്പന്നങ്ങൾ വികസിപ്പിക്കാനുള്ള സാധ്യത ചിത്രീകരിച്ചു. പരമ്പരാഗത മനുഷ്യനെയുള്ള വായുവിലൂടെയുള്ള സെൻസറുകളുമായി താരതമ്യപ്പെടുത്തുമ്പോൾ, കൃഷിക്കായുള്ള ഒരു കുറഞ്ഞ ചെലവ് യുഎവി സംവിധാനത്തിന് വിളകളുടെ ബയോഫിസിക്കൽ പാരാമീറ്ററുകളുടെ താരതമ്യപ്പെടുത്താവുന്ന കണക്കുകൾ നേടാൻ കഴിയും, മികച്ചതല്ലെങ്കിൽ. താങ്ങാനാവുന്ന വിലയും പ്രവർത്തന വഴക്കവും, ഉയർന്ന സ്പെക്ട്രൽ, സ്പേഷ്യൽ, ടെമ്പറൽ റെസല്യൂഷനുകൾ എന്നിവയ്ക്കൊപ്പം, ജലസേചന ഷെഡ്യൂളിംഗ്, കൃത്യമായ കൃഷി എന്നിവയുൾപ്പെടെ സമയ-നിർണ്ണായക മാനേജ്മെൻ്റ് ആവശ്യമായ നിരവധി ആപ്ലിക്കേഷനുകൾക്ക് യുഎവികൾ അനുയോജ്യമാക്കുന്നു. ബെർണി തുടങ്ങിയവരുടെ പ്രബന്ധം. (2009)b വളരെ ഉദ്ധരിക്കപ്പെടുന്നു, കാരണം അത് ഒരു ആളില്ലാ റോട്ടറി-വിംഗ് പ്ലാറ്റ്ഫോമും കാർഷിക ആപ്ലിക്കേഷനുകൾക്ക് ആവശ്യമായ കാലിബ്രേഷൻ സംവിധാനങ്ങളുള്ള ഡിജിറ്റൽ, തെർമൽ സെൻസറുകളും ഫലപ്രദമായി സംയോജിപ്പിച്ചിരിക്കുന്നു. ഏറ്റവും കൂടുതൽ ഉദ്ധരിക്കപ്പെട്ട രണ്ടാമത്തെ പ്രസിദ്ധീകരണം ഓസ്റ്റിൻ (2010) രചിച്ച ഒരു പുസ്തകമാണ്, അദ്ദേഹം രൂപകൽപ്പന, വികസനം, വിന്യാസ വീക്ഷണകോണുകളിൽ നിന്ന് UAV-കളെ ചർച്ച ചെയ്തു. കൃഷിയിൽ, വിളകളുടെ നിറം മാറുന്നതിലൂടെയും വിളകളുടെ വിതയ്ക്കലും തളിക്കലും സുഗമമാക്കുകയും കന്നുകാലികളെ നിരീക്ഷിക്കുകയും ഓടിക്കുകയും ചെയ്യുന്നതിലൂടെയും വിളകളുടെ മേൽനോട്ടത്തെ യുഎവികൾ പിന്തുണയ്ക്കുന്നു.
സള്ളിവൻ തുടങ്ങിയവരുടെ പഠനങ്ങൾ. (2007), Lumme et al. (2008), കൂടാതെ Gokto ¨ ǧan et al. (2010) ഏറ്റവും കൂടുതൽ ഉദ്ധരിച്ച ആദ്യ പതിനഞ്ച് ലേഖനങ്ങളുടെ പട്ടിക പൂർത്തിയാക്കുക. കൃഷിയെ പിന്തുണയ്ക്കുന്നതിനായി UAV അടിസ്ഥാനമാക്കിയുള്ള സംവിധാനങ്ങളുടെ വികസനം ഈ ലേഖനങ്ങൾ ചിത്രീകരിക്കുന്നു. വിള നിരീക്ഷണവും സ്കാനിംഗും, കള നിരീക്ഷണവും പരിപാലനവും, തീരുമാന പിന്തുണയും പോലുള്ള വിവിധ പ്രശ്നങ്ങൾക്കുള്ള പരിഹാരങ്ങൾ അവർ വാഗ്ദാനം ചെയ്യുന്നു. സാമ്പിളിംഗ് കാര്യക്ഷമത വർദ്ധിപ്പിക്കുന്നതിനും കൃത്യവും ഫലപ്രദവുമായ ആസൂത്രണം ചെയ്യുന്നതിൽ കർഷകരെ സഹായിക്കുന്നതിനുള്ള യുഎവിയുടെ കഴിവിനെ അവർ നിർദ്ദേശിക്കുകയും ചർച്ച ചെയ്യുകയും ചെയ്യുന്നു.
നടീൽ തന്ത്രങ്ങൾ. കാർഷിക ഡ്രോണുമായി ബന്ധപ്പെട്ട ഗവേഷണത്തിൽ അദ്ദേഹത്തിൻ്റെ കാര്യമായ സ്വാധീനം അടിവരയിടുന്ന രണ്ട് പ്രബന്ധങ്ങൾ ബെർണി രചിച്ചു (Berni et al., 2009b; Berni et al., 2009a). Zarco-Tejada et al. (2014) മരത്തിൻ്റെ ഉയരം അളക്കുന്നതിൽ കുറഞ്ഞ ചെലവിൽ UAV ഇമേജറി ഉപയോഗിക്കേണ്ടതിൻ്റെ ആവശ്യകത വ്യക്തമാക്കുന്ന പയനിയറിംഗ് പഠനങ്ങളിൽ ഒന്നാണ്.
ഏറ്റവും കൂടുതൽ ഉദ്ധരിക്കപ്പെട്ട പ്രസിദ്ധീകരണങ്ങളുടെ പട്ടിക.
| റാങ്ക് | 1990 മുതൽ XNUM വരെ | 2011 മുതൽ XNUM വരെ | ||
| പ്രമാണം | ഉദ്ധരണി | പ്രമാണം | ഉദ്ധരണി | |
| 1 | (ബെർണി et al., 2009b) | 831 | (സി. ഷാങ് & കോവാക്സ്, 2012) | 967 |
| 2 | (ഓസ്റ്റിൻ, 2010) | 498 | (Nex & Remondino, 2014) | 893 |
| 3 | (ഹണ്ട് et al., 2010) | 331 | (ഫ്ലോറിയാനോ & വുഡ്, 2015) | 552 |
| 4 | (എസ്ആർ ഹെർവിറ്റ്സ് എറ്റ്., 2004) | 285 | (ഹോസൈൻ മൊട്ട്ലാഗ് et al., 2016) | 391 |
| 5 | (CCD Lelong et al., 2008) | 272 | (ശാഖത്രേഹ് et al., 2019) | 383 |
| 6 | (ബെർണി et al., 2009b) | 250 | (Ma et al., 2017) | 373 |
| 7 | (Grenzdorffer ¨ et al., 2008) | 198 | (Bendig et al., 2014) | 360 |
| 8 | (ഹ്രബാർ et al., 2005) | 175 | (സാർകോ-തേജഡ et al., 2014) | 347 |
| 9 | (Y. Huang et al., 2009) | 129 | (Ad˜ ao et al., 2017) | 335 |
| 10 | (Schmale III et al., 2008) | 119 | (Honkavaara et al., 2013) | 331 |
| 11 | (അബ്ദുൾറഹ്മാൻ et al., 2005) | 79 | (കാൻഡിയാഗോ et al., 2015) | 327 |
| 12 | (ടെക്കി മറ്റുള്ളവരും, 2010) | 69 | (സിയാൻ & ടിയാൻ, 2011) | 307 |
| 13 | (Sullivan et al., 2007) | 51 | (Matese et al., 2015) | 303 |
| 14 | (Lumme et al., 2008) | 42 | (ഗാഗോ et al., 2015) | 275 |
| 15 | (Gokto ¨ ǧan et al., 2010) | 40 | (ആസെൻ et al., 2015a) | 269 |
രണ്ടാം കാലഘട്ടത്തിൽ (2011-2021), Zhang and Kovacs (2012), Nex and Remondino (2014) എന്നിവരുടെ ഗവേഷണം ഏറ്റവും കൂടുതൽ ഉദ്ധരിക്കപ്പെട്ട പ്രസിദ്ധീകരണങ്ങൾക്ക് കാരണമായി. ജിയോഗ്രഫിക് ഇൻഫർമേഷൻ സിസ്റ്റങ്ങൾ, ജിപിഎസ്, റിമോട്ട് സെൻസിംഗ് എന്നിവ പോലുള്ള ജിയോസ്പേഷ്യൽ ടെക്നിക്കുകളും സെൻസറുകളും നടപ്പിലാക്കുന്നതിലൂടെ ഈ മേഖലയിലെ വ്യതിയാനങ്ങൾ പിടിച്ചെടുക്കാനും ബദൽ തന്ത്രങ്ങൾ അവലംബിച്ച് അവ കൈകാര്യം ചെയ്യാനും കൃത്യമായ കൃഷി പ്രയോജനപ്പെടുമെന്ന് Zhang and Kovacs (2012) വാദിക്കുന്നു. കൃത്യമായ കൃഷിയിൽ ഒരു മാറ്റം വരുത്തുന്നയാളെന്ന നിലയിൽ, ഡ്രോണുകളുടെ ദത്തെടുക്കൽ റിമോട്ട് സെൻസിംഗ്, വ്യോമ നിരീക്ഷണം ലളിതമാക്കൽ, വിള വളർച്ചാ ഡാറ്റ, മണ്ണിൻ്റെ അവസ്ഥ, സ്പ്രേ ചെയ്യുന്ന പ്രദേശങ്ങൾ എന്നിവയിൽ ഒരു പുതിയ യുഗത്തിന് തുടക്കമിട്ടു. പ്ലാറ്റ്ഫോം, ക്യാമറ പരിമിതികൾ, ഡാറ്റാ പ്രോസസ്സിംഗ് വെല്ലുവിളികൾ, കർഷക ഇടപെടൽ, വ്യോമയാന നിയന്ത്രണങ്ങൾ എന്നിങ്ങനെ പാരിസ്ഥിതിക നിരീക്ഷണത്തിലും കൃത്യമായ കൃഷിയിലും ഈ ഉപകരണങ്ങളുടെ നിലവിലുള്ള ഉപയോഗങ്ങളും വെല്ലുവിളികളും വെളിപ്പെടുത്തി UAV-കളെക്കുറിച്ചുള്ള ഉൾക്കാഴ്ചകൾ പ്രദാനം ചെയ്യുന്നതിനാൽ Zhang and Kovacs (2012) അവലോകനം വളരെ പ്രധാനമാണ്. . രണ്ടാമത്തെ
Nex, Remondino (2014) എന്നിവയിൽ നിന്നുള്ള ഏറ്റവും കൂടുതൽ ഉദ്ധരിക്കപ്പെട്ട പഠനം, ഭൂമിയുടെ ചിത്രങ്ങൾ പകർത്തുന്നതിനും പ്രോസസ്സ് ചെയ്യുന്നതിനും വിശകലനം ചെയ്യുന്നതിനുമുള്ള UAV-കളുടെ അത്യാധുനിക നിലവാരം അവലോകനം ചെയ്തു.
യുഎവി ഇമേജ് പ്രോസസ്സിംഗിലെ ഏറ്റവും പുതിയ മുന്നേറ്റങ്ങൾ കാണിക്കുന്ന നിരവധി യുഎവി പ്ലാറ്റ്ഫോമുകൾ, ആപ്ലിക്കേഷനുകൾ, ഉപയോഗ കേസുകൾ എന്നിവയുടെ ഒരു അവലോകനവും അവരുടെ പ്രവർത്തനം അവതരിപ്പിച്ചു. കൃഷിയിൽ, കർഷകർക്ക് ചെലവും സമയവും ലാഭിക്കുന്നതിനും, നാശനഷ്ടങ്ങളുടെ ദ്രുതവും കൃത്യവുമായ രേഖകൾ ലഭിക്കുന്നതിനും സാധ്യമായ പ്രശ്നങ്ങൾ മുൻകൂട്ടി അറിയുന്നതിനും ഫലപ്രദമായ തീരുമാനങ്ങൾ എടുക്കുന്നതിന് UAV-കൾ ഉപയോഗിക്കാം. പരമ്പരാഗത ഏരിയൽ പ്ലാറ്റ്ഫോമുകളിൽ നിന്ന് വ്യത്യസ്തമായി, ഉയർന്ന കൃത്യതയുള്ള സാധ്യതകൾ കാത്തുസൂക്ഷിക്കുമ്പോൾ തന്നെ UAV-കൾക്ക് പ്രവർത്തന ചെലവുകൾ കുറയ്ക്കാനും കഠിനമായ സ്ഥലങ്ങളിലേക്കുള്ള പ്രവേശനത്തിൻ്റെ അപകടം കുറയ്ക്കാനും കഴിയും. അവരുടെ പേപ്പർ യുഎവികളുടെ വിവിധ ഗുണങ്ങളെ സംഗ്രഹിക്കുന്നു, പ്രത്യേകിച്ചും കൃത്യതയുടെയും റെസല്യൂഷൻ്റെയും കാര്യത്തിൽ.
2011 നും 2021 നും ഇടയിൽ ഏറ്റവുമധികം ഉദ്ധരിച്ച പതിമൂന്ന് പ്രസിദ്ധീകരണങ്ങളിൽ, ഇമേജിംഗ് മിഷനുകളിലെ ഡ്രോൺ ആപ്ലിക്കേഷനുകളുമായി ബന്ധിപ്പിച്ചിട്ടുള്ള ഗവേഷണത്തിൽ കൂടുതൽ ശ്രദ്ധ കേന്ദ്രീകരിക്കുന്നത് ഞങ്ങൾ ശ്രദ്ധിച്ചു (Bendig et al., 2014; Ma et al., 2017; Zarco-Tejada et al., 2014). , കൃത്യമായ കൃഷി (Candiago et al., 2015; Honkavaara et al., 2013a), Precision viticulture (Matese et al., 2015), ജല സമ്മർദ്ദം വിലയിരുത്തൽ (Gago et al., 2015), സസ്യ നിരീക്ഷണം (Aasen ) , 2015a). ആദ്യ വർഷങ്ങളിൽ ഗവേഷകർ ശ്രദ്ധ കേന്ദ്രീകരിച്ചു
കൃഷിക്കായി കുറഞ്ഞ ചെലവും ഭാരം കുറഞ്ഞതും കൃത്യവുമായ യുഎവി അധിഷ്ഠിത സംവിധാനങ്ങൾ വികസിപ്പിക്കുന്നതിൽ കൂടുതൽ; സമീപകാല ഗവേഷണങ്ങൾ കൃഷിക്കും ഫീൽഡ് സർവേയിംഗിനുമുള്ള യുഎവി ആപ്ലിക്കേഷനുകളുടെ അവലോകനങ്ങളിൽ കൂടുതൽ ശ്രദ്ധ കേന്ദ്രീകരിച്ചു. ചുരുക്കത്തിൽ, യുഎവികളുടെ നിലവിലെ ശാസ്ത്ര-സാങ്കേതിക നില വിലയിരുത്തുന്നതിനും കൃത്യമായ കൃഷിയെ പിന്തുണയ്ക്കുന്നതിനായി യുഎവി സംവിധാനങ്ങൾ വികസിപ്പിച്ചെടുക്കുന്നതിനും സ്വാധീനമുള്ള പ്രസിദ്ധീകരണങ്ങൾ മുൻകാല പഠനങ്ങളുടെ അവലോകനങ്ങൾ നൽകിയിട്ടുണ്ടെന്ന് ഈ വിശകലനം വെളിപ്പെടുത്തുന്നു. രസകരമെന്നു പറയട്ടെ, അനുഭവപരമായ പഠനങ്ങൾ ഞങ്ങൾ കണ്ടെത്തിയില്ല
മെത്തഡോളജികൾ അല്ലെങ്കിൽ വിവരണാത്മക കേസ് പഠനങ്ങൾ, ഇത് കാര്യമായ വിജ്ഞാന വിടവ് സൃഷ്ടിക്കുകയും ഈ വിഷയത്തിൽ കൂടുതൽ ഗവേഷണം ആവശ്യപ്പെടുകയും ചെയ്യുന്നു.
സഹ ഉദ്ധരണി വിശകലനം
Gmür (2006) അനുസരിച്ച്, കോ-സൈറ്റേഷൻ വിശകലനം സമാന പ്രസിദ്ധീകരണങ്ങളെ തിരിച്ചറിയുകയും അവയെ ക്ലസ്റ്ററുകൾ ചെയ്യുകയും ചെയ്യുന്നു. ഒരു ക്ലസ്റ്ററിൻ്റെ സൂക്ഷ്മപരിശോധന പ്രസിദ്ധീകരണങ്ങൾക്കിടയിൽ ഒരു പൊതു ഗവേഷണ മേഖലയെ വെളിപ്പെടുത്താൻ കഴിയും. അനുബന്ധ വിഷയ മേഖലകൾ ചിത്രീകരിക്കുന്നതിനും പ്രസിദ്ധീകരണങ്ങളുടെ ബൗദ്ധിക പാറ്റേണുകൾ കണ്ടെത്തുന്നതിനും കാർഷിക ഡ്രോണുകളുമായി ബന്ധപ്പെട്ട സാഹിത്യത്തിൻ്റെ സഹ ഉദ്ധരണി ഞങ്ങൾ അന്വേഷിക്കുന്നു. ഇക്കാര്യത്തിൽ, സ്മാൾ (1973) ഏറ്റവും സ്വാധീനമുള്ളതും അടിസ്ഥാനപരവുമായ ഗവേഷണം പഠിക്കാൻ കോസിറ്റേഷൻ വിശകലനം ഉപയോഗിക്കാൻ ശുപാർശ ചെയ്തു.
ഒരു അച്ചടക്കത്തിനുള്ളിൽ. സെറ്റിനെ ഏറ്റവും പ്രധാനപ്പെട്ട ലേഖനങ്ങളിലേക്ക് പരിമിതപ്പെടുത്തുന്നതിന് (ഗോയൽ & കുമാർ, 2021), ഞങ്ങൾ 25-ൻ്റെ ഒരു കോ-സൈറ്റേഷൻ പരിധി സജ്ജീകരിച്ചു, അതായത് 25-ഓ അതിലധികമോ വ്യത്യസ്ത പ്രസിദ്ധീകരണങ്ങളുടെ റഫറൻസ് ലിസ്റ്റുകളിൽ രണ്ട് ലേഖനങ്ങൾ ഒരുമിച്ച് ഉദ്ധരിച്ചിരിക്കണം. ക്ലസ്റ്ററിംഗും ഏറ്റവും കുറഞ്ഞ ക്ലസ്റ്റർ സൈസ് 1 ഉപയോഗിച്ചും ചെറിയ ക്ലസ്റ്ററുകൾ വലിയവയുമായി ലയിപ്പിക്കുന്നതിനുള്ള ഒരു രീതിയുമില്ലാതെയാണ് നടത്തിയത്. തൽഫലമായി, പഠനങ്ങളുടെ സമാനതയും അവയുടെ ബൗദ്ധിക ഘടനയും അടിസ്ഥാനമാക്കി ആറ് ക്ലസ്റ്ററുകൾ സൃഷ്ടിക്കപ്പെട്ടു. ഓരോ ക്ലസ്റ്ററിലെയും പ്രസിദ്ധീകരണങ്ങളുടെ വിതരണം പട്ടിക 6 കാണിക്കുന്നു.
ക്ലസ്റ്റർ 1: ഈ ക്ലസ്റ്ററിലെ പ്രസിദ്ധീകരണങ്ങൾ പരിസ്ഥിതി നിരീക്ഷണം, വിള പരിപാലനം, കള പരിപാലനം എന്നിവയെ പിന്തുണയ്ക്കുന്നതിൽ ഡ്രോണുകളുടെ പങ്ക് ചർച്ച ചെയ്തതിന് ശേഷം പ്രസിദ്ധീകരിച്ച പതിനെട്ട് രേഖകൾ ഈ ക്ലസ്റ്ററിൽ അടങ്ങിയിരിക്കുന്നു. ഉദാഹരണത്തിന്, Manfreda et al. (2018) പ്രകൃതി കാർഷിക ആവാസവ്യവസ്ഥയുടെ നിരീക്ഷണത്തിൽ UAV യുടെ നിലവിലെ ഗവേഷണത്തിൻ്റെയും നടപ്പാക്കലുകളുടെയും ഒരു അവലോകനം നൽകുകയും പാരിസ്ഥിതിക നിരീക്ഷണം ഗണ്യമായി വർദ്ധിപ്പിക്കുന്നതിനും കുറയ്ക്കുന്നതിനും സാങ്കേതികവിദ്യ വളരെയധികം സാധ്യതകൾ പ്രദാനം ചെയ്യുന്നുവെന്ന് വാദിക്കുന്നു.
ഫീൽഡ് നിരീക്ഷണവും പരമ്പരാഗത വായുവും ബഹിരാകാശവാഹന വിദൂര സംവേദനവും തമ്മിലുള്ള നിലവിലുള്ള വിടവ്. മെച്ചപ്പെട്ട താൽക്കാലിക വീണ്ടെടുക്കലിനായി പുതിയ ശേഷിയും താങ്ങാനാവുന്ന രീതിയിൽ വലിയ പ്രദേശങ്ങളിലേക്കുള്ള സ്പേഷ്യൽ ഉൾക്കാഴ്ചയും വാഗ്ദാനം ചെയ്തുകൊണ്ട് ഇത് ചെയ്യാൻ കഴിയും. UAV-കൾക്ക് നിരന്തരം പരിസ്ഥിതിയെ മനസ്സിലാക്കാനും തത്ഫലമായുണ്ടാകുന്ന ഡാറ്റ രോഗത്തിൻ്റെ അഭാവം അല്ലെങ്കിൽ ജലം കണ്ടെത്തൽ (Padua et al., 2017) പോലുള്ള ആത്യന്തിക പ്രശ്നങ്ങൾ തിരിച്ചറിയാൻ സെൻസറുകളെ നിയന്ത്രിക്കുന്ന ബുദ്ധിയുള്ള, കേന്ദ്രീകൃത/വികേന്ദ്രീകൃത സ്ഥാപനങ്ങളിലേക്ക് അയയ്ക്കാനും കഴിയും. അഡാവോ ˜ et al. (2017) ജലത്തിൻ്റെ അവസ്ഥ, ബയോമാസ് എസ്റ്റിമേഷൻ, ഓജസ്സ് വിലയിരുത്തൽ എന്നിവയുമായി ബന്ധപ്പെട്ട അസംസ്കൃത ഡാറ്റയുടെ ഒരു വലിയ അളവ് ക്യാപ്ചർ ചെയ്ത് സസ്യങ്ങളുടെ അവസ്ഥ വിലയിരുത്തുന്നതിന് യുഎവികൾ അനുയോജ്യമാണെന്ന് അഭിപ്രായപ്പെടുന്നു. റിമോട്ട് സെൻസിംഗ് ഡാറ്റ സമയബന്ധിതമായി പിടിച്ചെടുക്കാൻ അനുവദിക്കുന്നതിന് ശരിയായ പാരിസ്ഥിതിക സാഹചര്യങ്ങളിൽ UAV-മൌണ്ട് ചെയ്ത സെൻസറുകൾ ഉടനടി വിന്യസിക്കാം (Von Bueren et al., 2015). ഇൻഡോർ ഫാമിംഗ് പരിതസ്ഥിതികളുടെ (ഉദാഹരണത്തിന്, ഹരിതഗൃഹങ്ങൾ) ത്രിമാന സ്ഥലങ്ങളിൽ നിന്ന് പ്രായോഗികമായി ഏത് സ്ഥലത്തുനിന്നും അളവുകൾ സമ്പാദിച്ച്, അതുവഴി പ്രാദേശിക കാലാവസ്ഥാ നിയന്ത്രണവും സസ്യ നിരീക്ഷണവും ഉറപ്പാക്കിക്കൊണ്ട് ഇൻഡോർ ഫാമിംഗ് പ്രവർത്തനങ്ങൾ നടത്താൻ കർഷകർക്ക് UAV-കൾ വഴി കഴിയും. ., 2015). കൃത്യതയുടെ പശ്ചാത്തലത്തിൽ
കൃഷി, വിള പരിപാലന തീരുമാനങ്ങൾക്ക് ഉചിതമായ താൽക്കാലികവും സ്പേഷ്യൽ റെസലൂഷനും ഉള്ള കൃത്യവും വിശ്വസനീയവുമായ വിള ഡാറ്റ ആവശ്യമാണ് (Gebbers & Adamchuk, 2010; Gevaert et al., 2015; Maes & Steppe, 2019). ഇക്കാരണത്താൽ, Agüera Vega et al. (2015) വളരുന്ന സീസണിൽ ഒരു സൂര്യകാന്തി വിളയുടെ ചിത്രങ്ങൾ സ്വന്തമാക്കാൻ UAV-മൌണ്ട് ചെയ്ത മൾട്ടിസ്പെക്ട്രൽ സെൻസർ സിസ്റ്റം ഉപയോഗിച്ചു. അതുപോലെ, Huang et al. (2009) UAV-കളെ അടിസ്ഥാനമാക്കിയുള്ള റിമോട്ട് സെൻസിംഗ്, ശേഖരിച്ച സ്പെക്ട്രൽ ഡാറ്റയിൽ നിന്ന് വിളകളും മണ്ണും അളക്കാൻ സഹായിക്കുന്നു. വെർജർ തുടങ്ങിയവർ. (2014) ഗോതമ്പ്, റാപ്സീഡ് വിളകളിൽ ശ്രദ്ധ കേന്ദ്രീകരിച്ച്, കൃത്യമായ കാർഷിക ആപ്ലിക്കേഷനുകളിലെ UAV പ്രതിഫലന അളവുകളിൽ നിന്ന് ഗ്രീൻ ഏരിയ സൂചിക (GAI) കണക്കാക്കുന്നതിനുള്ള ഒരു സാങ്കേതികത വികസിപ്പിക്കുകയും പരീക്ഷിക്കുകയും ചെയ്തു. അതിനാൽ, ഡ്രോണുകൾ ഇടയ്ക്കിടെയുള്ള പുനരവലോകനങ്ങളും ഉയർന്ന സ്പേഷ്യൽ റെസല്യൂഷനും ഉപയോഗിച്ച് ക്രോപ്പ് സ്റ്റേറ്റ് വിവരങ്ങൾ വീണ്ടെടുക്കുന്നതിനുള്ള പുതിയ സാധ്യതകൾ നൽകുന്നു (Dong et al., 2019; Garzonio et al., 2017; H. Zheng et al., 2016).
കാർഷിക ഡ്രോണുകളെക്കുറിച്ചുള്ള സ്വാധീനമുള്ള പ്രസിദ്ധീകരണങ്ങളുടെ ക്ലസ്റ്ററിംഗ്.
| ക്ലസ്റ്റർ | വിശാലമായ തീം | അവലംബം |
| 1 | പരിസ്ഥിതി നിരീക്ഷണം, വിള മാനേജ്മെൻ്റ്, കള മാനേജ്മെൻ്റ് | (Ad˜ ao et al., 2017; അഗ്യൂറ വേഗ et al., 2015; ഡി കാസ്ട്രോ et al., 2018; Gomez-Cand ô on ô et al., 2014; വൈ.ബി ഹുവാങ് et al., 2013; ഖനാൽ et al., 2017; ലോപ്പസ്-ഗ്രനാഡോസ്, 2011; Manfreda et al., 2018; പി adua et al., 2017; പെന ˜ et al., 2013; പെരെസ്-ഓർട്ടിസ് et al., 2015; റാസ്മുസെൻ et al., 2013, 2016; ടോറസ്-എസ്´ anchez et al., 2014; ടോറസ്-സാഞ്ചസ്, 'ലോപ്പസ്-ഗ്രനാഡോസ്,' & പെന, ˜ 2015; വെർജർ et al., 2014; വോൺ ബ്യൂറൻ et al., 2015; സി. ഷാങ് & കോവാക്സ്, 2012) |
| 2 | റിമോട്ട് ഫിനോടൈപ്പിംഗ്, വിളവ് കണക്കാക്കൽ, വിള ഉപരിതല മാതൃക, സസ്യങ്ങളുടെ എണ്ണൽ | (Bendig et al., 2013, 2014; Geipel et al., 2014; ഗ്നാഡിംഗർ ¨ & ഷ്മിഡാൽറ്റർ, 2017; ഹാഗിഘട്ടലാബ് et al., 2016; ഹോൾമാൻ et al., 2016; ജിൻ et al., 2017; W. Li et al., 2016; Maimaitijiang et al., 2017; ശങ്കരൻ et al., 2015; ഷിർമാൻ et al., 2016; ഷി et al., 2016; Yue et al., 2017; എക്സ്. Zhou et al., 2017) |
| 3 | വെള്ളത്തിനായുള്ള തെർമൽ ഇമേജിംഗ്, മൾട്ടിസ്പെക്ട്രൽ ഇമേജിംഗ് | (Baluja et al., 2012; Berni et al., 2009ബി; ബെർണി et al., 2009a; കാൻഡിയാഗോ et al., 2015; ഗാഗോ et al., 2015; ഗോൺസാലസ്-ഡുഗോ et al., 2013, 2014; Grenzdorffer ¨ et al., 2008; ഖാലിഖ് et al., 2019; Matese et al., 2015; റിബെയ്റോ-ഗോംസ് et al., 2017; Santesteban et al., 2017; Uto et al., 2013) |
| 4 | ഹൈപ്പർസെക്ട്രൽ ഇമേജിംഗ്, സ്പെക്ട്രൽ ഇമേജിംഗ് | (Aasen et al., 2015a; Bareth et al., 2015; ഹകാല et al., 2013; Honkavaara et al., 2013a; ലൂസിയർ et al., 2014; സാരി et al., 2011; സുവോമലൈനൻ et al., 2014) |
| 5 | 3D-മാപ്പിംഗ് ആപ്ലിക്കേഷനുകൾ | (ജിംനെസ്-ബ്രേനസ് et al., 2017; Nex & റെമോണ്ടിനോ, 2014; സലാമി തുടങ്ങിയവർ., 2014; ടോറസ്-എസ്´ ആഞ്ചസ്, ലോപ്പസ്-' ഗ്രാനഡോസ്, സെറാനോ, et al., 2015; Zahawi et al., 2015; സർകോ-തേജഡ et al., 2014) |
| 6 | കാർഷിക നിരീക്ഷണം | (എസ്ആർ ഹെർവിറ്റ്സ് എറ്റ്., 2004; ഹണ്ട് et al., 2010; CCD ലെലോംഗ് et al., 2008; Primicerio et al., 2012; സിയാങ് & ടിയാൻ, 2011) |
കൂടാതെ, കള മാപ്പിംഗ് ഉൾപ്പെടെയുള്ള കാർഷിക മേഖലയിലെ വെല്ലുവിളി നിറഞ്ഞ ജോലികൾക്ക് ഡ്രോണുകൾ ഉപയോഗപ്രദമാണ്. ഉപകരണങ്ങൾ പകർത്തിയ ചിത്രങ്ങൾ വയലുകളിലെ കളകൾ നേരത്തേ കണ്ടെത്തുന്നതിന് അവയുടെ പ്രയോജനം തെളിയിച്ചിട്ടുണ്ട് (ഡി കാസ്ട്രോ et al., 2018; Jim´enez-Brenes et al., 2017; Lam et al., 2021; Lopez-Granados et al., 2016; Rozenberg et al., 2021). ഇക്കാര്യത്തിൽ, ഡി കാസ്ട്രോ et al. (2018) UAV ഇമേജറിയുടെയും ഒബ്ജക്റ്റ്-ബേസ്ഡ് ഇമേജ് അനാലിസിസിൻ്റെയും (ഒബിഐഎ) ലയനം, പുൽമേടുകളുടെ ആദ്യകാല വിളകളിൽ നേരത്തെയുള്ള കണ്ടെത്തൽ ഓട്ടോമേറ്റ് ചെയ്യുന്ന പ്രശ്നം മറികടക്കാൻ പ്രാക്ടീഷണർമാരെ പ്രാപ്തരാക്കിയിട്ടുണ്ട്, ഇത് കള ഗവേഷണത്തിലെ ഒരു വലിയ മുന്നേറ്റമാണ്. അതുപോലെ, പെന ˜ et al. (2013) ചൂണ്ടിക്കാണിക്കുന്നത്, UAV-ൽ നിന്നുള്ള അൾട്രാ-ഹൈ സ്പേഷ്യൽ റെസല്യൂഷൻ ഇമേജുകൾ OBIA നടപടിക്രമവുമായി സംയോജിപ്പിച്ച് ഉപയോഗിക്കുന്നത്, ആദ്യകാല ചോളം വിളകളിൽ കള ഭൂപടങ്ങൾ സൃഷ്ടിക്കുന്നത് സാധ്യമാക്കുന്നു, അത് സീസണിൽ കള നിയന്ത്രണ നടപടികൾ ആസൂത്രണം ചെയ്യാൻ ഉപയോഗിക്കാം. ഉപഗ്രഹത്തിൻ്റെയും പരമ്പരാഗത വായുവിലൂടെയുള്ള ചിത്രങ്ങളുടെയും കഴിവിനപ്പുറമുള്ള ഒരു ജോലി. ഇമേജ് ക്ലാസിഫിക്കേഷൻ അല്ലെങ്കിൽ ഒബ്ജക്റ്റ് ഡിറ്റക്ഷൻ അൽഗോരിതങ്ങളുമായി താരതമ്യപ്പെടുത്തുമ്പോൾ, കള മാപ്പിംഗ് ജോലികളിൽ സെമാൻ്റിക് സെഗ്മെൻ്റേഷൻ ടെക്നിക്കുകൾ കൂടുതൽ ഫലപ്രദമാണ് (J. Deng et al., 2020), അങ്ങനെ കർഷകർക്ക് ഫീൽഡ് അവസ്ഥ കണ്ടെത്താനും നഷ്ടം ലഘൂകരിക്കാനും വളരുന്ന സീസണിലുടനീളം വിളവ് മെച്ചപ്പെടുത്താനും കഴിയും (രമേഷ് et al., 2020). ആഴത്തിലുള്ള പഠനത്തെ അടിസ്ഥാനമാക്കിയുള്ള സെമാൻ്റിക് സെഗ്മെൻ്റേഷന് ഉയർന്ന റെസല്യൂഷൻ ഏരിയൽ ഇമേജുകളിൽ നിന്ന് സസ്യങ്ങളുടെ കവറിൻ്റെ കൃത്യമായ അളവെടുപ്പ് നൽകാനും കഴിയും (രമേഷ് et al., 2020; A. Zheng et al., 2022). റിമോട്ട് അവരുടെ സാധ്യത ഉണ്ടായിരുന്നിട്ടും
സെൻസിംഗ് പിക്സൽ ക്ലാസിഫിക്കേഷൻ, സെമാൻ്റിക് സെഗ്മെൻ്റേഷൻ ടെക്നിക്കുകൾക്ക് കാര്യമായ ഗണനവും നിരോധിതമായി ഉയർന്ന GPU മെമ്മറിയും ആവശ്യമാണ് (J. Deng et al., 2020).
മെഷീൻ ലേണിംഗ്, UAV എന്നിവയെ അടിസ്ഥാനമാക്കി, P´erez-Ortiz et al. (2015) കർഷകർ ആവിർഭാവത്തിനു ശേഷമുള്ള കള നിയന്ത്രണം സ്വീകരിക്കുമ്പോൾ, സൈറ്റ്-നിർദ്ദിഷ്ട കള നിയന്ത്രണ തന്ത്രങ്ങൾ നൽകുന്നതിന് ഒരു കള മാപ്പിംഗ് സമീപനം നിർദ്ദേശിച്ചു. ഒടുവിൽ, റാസ്മുസൻ തുടങ്ങിയവർ. (2013) ഡ്രോണുകൾ മികച്ച സ്പേഷ്യൽ റെസല്യൂഷൻ ഫ്ലെക്സിബിലിറ്റിയോടെ വിലകുറഞ്ഞ സെൻസിംഗ് നൽകുന്നുവെന്ന് ഹൈലൈറ്റ് ചെയ്തു. മൊത്തത്തിൽ, ഈ ക്ലസ്റ്ററിലെ പ്രസിദ്ധീകരണങ്ങൾ റിമോട്ട് സെൻസിംഗ്, ക്രോപ്പ് മോണിറ്ററിംഗ്, വീഡ് മാപ്പിംഗ് എന്നിവയെ പിന്തുണയ്ക്കുന്നതിന് UAV-കളുടെ സാധ്യതകൾ പര്യവേക്ഷണം ചെയ്യുന്നതിൽ ശ്രദ്ധ കേന്ദ്രീകരിക്കുന്നു. പാരിസ്ഥിതിക നിരീക്ഷണം, വിള പരിപാലനം, കള മാപ്പിംഗ് എന്നിവയിലെ ഡ്രോൺ ആപ്ലിക്കേഷനുകൾക്ക് കൂടുതൽ സുസ്ഥിരമായ കൃഷി എങ്ങനെ കൈവരിക്കാനാകുമെന്ന് കൂടുതൽ അന്വേഷിക്കാൻ കൂടുതൽ ആഴത്തിലുള്ള ഗവേഷണം ആവശ്യമാണ് (ചമുവാ & സിംഗ്, 2019; ഇസ്ലാം et al., 2021; Popescu et al., 2020; J . Su, Liu, et al., 2018) കൂടാതെ വിള ഇൻഷുറൻസ് ആപ്ലിക്കേഷനുകളിൽ ഈ സാങ്കേതികവിദ്യയുടെ ഭരണ പ്രശ്നങ്ങൾ പരിഹരിക്കുക (Basnet & Bang, 2018; Chamuah & Singh, 2019, 2022; Meinen & Robinson, 2021). പ്രോസസ്സ് ചെയ്ത ഡാറ്റയുടെ ആത്യന്തിക ഗുണനിലവാരം വർദ്ധിപ്പിക്കുന്നതിന് കാര്യക്ഷമമായ പ്രോസസ്സിംഗ് ടെക്നിക്കുകൾ ഉപയോഗിച്ച് UAV ശേഖരിച്ച അളവുകൾ സാധൂകരിക്കുന്നതിൽ ഗവേഷകർ ശ്രദ്ധ കേന്ദ്രീകരിക്കണം (Manfreda et al., 2018). കൂടാതെ, ഡിജിറ്റൽ ചിത്രങ്ങളിൽ കളകൾ പ്രദർശിപ്പിക്കുകയും UAV വീഡ് മാപ്പിംഗ് സമയത്ത് അപ്രസക്തമായ പശ്ചാത്തലം ഇല്ലാതാക്കുകയും ചെയ്യുന്ന പിക്സലുകളെ തിരിച്ചറിയുന്ന ഉചിതമായ അൽഗോരിതങ്ങളുടെ വികസനം ആവശ്യമാണ് (Gaˇsparovi´c et al., 2020; Hamylton et al., 2020; H. Huang et al. , 2018, 2020; ലോപ്പസ്- ഗ്രാനഡോസ് et al., 2016). സസ്യങ്ങൾ തിരിച്ചറിയൽ, ഇലകളുടെ വർഗ്ഗീകരണം, രോഗ മാപ്പിംഗ് എന്നിവയിൽ സെമാൻ്റിക് സെഗ്മെൻ്റേഷൻ ടെക്നിക്കുകൾ സ്വീകരിക്കുന്നതിനെക്കുറിച്ചുള്ള അധിക ഗവേഷണം സ്വാഗതാർഹമാണ് (Fuentes-Pacheco et al., 2019; Kerkech et al., 2020).
ക്ലസ്റ്റർ 2. ഈ ക്ലസ്റ്ററിലെ പ്രസിദ്ധീകരണങ്ങൾ കാർഷിക ഡ്രോണുകളുടെ നിരവധി വശങ്ങളിൽ ശ്രദ്ധ കേന്ദ്രീകരിച്ചു. റിമോട്ട് ഫിനോടൈപ്പിംഗുമായി ബന്ധപ്പെട്ട, ശങ്കരൻ തുടങ്ങിയവർ. (2015) വയലിലെ വിളകളുടെ പെട്ടെന്നുള്ള ഫിനോടൈപ്പിംഗിനായി UAV-കൾക്കൊപ്പം താഴ്ന്ന-ഉയരവും ഉയർന്ന റെസല്യൂഷനും ഉള്ള ഏരിയൽ ഇമേജിംഗ് ഉപയോഗിക്കുന്നതിനുള്ള സാധ്യതകൾ അവലോകനം ചെയ്തു, കൂടാതെ ഗ്രൗണ്ട് അധിഷ്ഠിത സെൻസിംഗ് പ്ലാറ്റ്ഫോമുകളുമായി താരതമ്യപ്പെടുത്തുമ്പോൾ, മതിയായ സെൻസറുകളുള്ള ചെറിയ UAV-കൾ നിരവധി ഗുണങ്ങൾ നൽകുന്നുവെന്ന് അവർ വാദിക്കുന്നു. , ഫീൽഡിലേക്കുള്ള എളുപ്പത്തിലുള്ള ആക്സസ്, ഉയർന്ന റെസല്യൂഷൻ ഡാറ്റ, കാര്യക്ഷമമായ ഡാറ്റ ശേഖരണം,
ഫീൽഡ് വളർച്ചാ സാഹചര്യങ്ങളുടെ ദ്രുത വിലയിരുത്തൽ, കുറഞ്ഞ പ്രവർത്തന ചെലവ്. എന്നിരുന്നാലും, ഫീൽഡ് ഫിനോടൈപ്പിംഗിനായി UAV യുടെ ഫലപ്രദമായ പ്രയോഗം രണ്ട് അടിസ്ഥാന ഘടകങ്ങളെ ആശ്രയിച്ചിരിക്കുന്നു, അതായത്, UAV സവിശേഷതകൾ (ഉദാ, സുരക്ഷ, സ്ഥിരത, സ്ഥാനനിർണ്ണയം, സ്വയംഭരണം), സെൻസർ സവിശേഷതകൾ (ഉദാ, റെസല്യൂഷൻ, ഭാരം, സ്പെക്ട്രൽ തരംഗദൈർഘ്യം, ഫീൽഡ്. വീക്ഷണം). ഹഗിഘത്തലാബ് et al. (2016) UAV ഇമേജറിയിൽ നിന്ന് പ്ലോട്ട്-ലെവൽ ഡാറ്റ വീണ്ടെടുക്കാനും ബ്രീഡിംഗ് പ്രക്രിയ ത്വരിതപ്പെടുത്താനും ഒരു സെമി-ഓട്ടോമേറ്റഡ് ഇമേജ് പ്രോസസിംഗ് പൈപ്പ്ലൈൻ നിർദ്ദേശിച്ചു. ഹോൾമാൻ തുടങ്ങിയവർ. (2016) ഒരു ഉയർന്ന വികസിപ്പിച്ചെടുത്തു
ത്രൂപുട്ട് ഫീൽഡ് ഫിനോടൈപ്പിംഗ് സിസ്റ്റം, കൂടാതെ UAV-ക്ക് ഗുണനിലവാരമുള്ളതും വലുതും ഫീൽഡ് അടിസ്ഥാനമാക്കിയുള്ളതുമായ ഫിനോടൈപ്പിക് ഡാറ്റ ശേഖരിക്കാൻ കഴിയുമെന്നും വലിയ പ്രദേശങ്ങളിലും വ്യത്യസ്ത ഫീൽഡ് ലൊക്കേഷനുകളിലും ഉപകരണം ഫലപ്രദമാണെന്നും ഹൈലൈറ്റ് ചെയ്തു.
വിളവ് കണക്കാക്കുന്നത് അവിശ്വസനീയമാംവിധം സുപ്രധാനമായ ഒരു വിവരമാണ്, പ്രത്യേകിച്ചും കൃത്യസമയത്ത് ലഭ്യമാകുമ്പോൾ, എല്ലാ ഫീൽഡ് അളവുകളും നൽകാനും ഉയർന്ന നിലവാരമുള്ള ഡാറ്റ കാര്യക്ഷമമായി നേടാനും യുഎവികൾക്ക് സാധ്യതയുണ്ട് (ഡാകിർ et al., 2017; Demir et al., 2018 2019, പുഡെൽകോ തുടങ്ങിയവർ ഇക്കാര്യത്തിൽ, ജിൻ et al. (2018) ഉയർന്ന റെസല്യൂഷനിലുള്ള ഇമേജറി വളരെ താഴ്ന്ന ഉയരത്തിൽ നിന്ന് UAV-കൾ നേടിയത് പ്രയോജനപ്പെടുത്തി, ഉയർന്നുവരുന്ന ഘട്ടത്തിൽ ഗോതമ്പ് ചെടികളുടെ സാന്ദ്രത കണക്കാക്കുന്നതിനുള്ള ഒരു രീതി വികസിപ്പിക്കുകയും വിലയിരുത്തുകയും ചെയ്തു. രചയിതാക്കൾ പറയുന്നതനുസരിച്ച്, UAV-കൾ ക്യാമറകൾ ഘടിപ്പിച്ച റോവർ സംവിധാനങ്ങളുടെ പരിമിതികളെ മറികടക്കുകയും വിളകളിലെ സസ്യ സാന്ദ്രത കണക്കാക്കുന്നതിനുള്ള ആക്രമണാത്മകമല്ലാത്ത രീതിയെ പ്രതിനിധീകരിക്കുകയും ചെയ്യുന്നു, ഇത് മണ്ണിൻ്റെ ഗതാഗതക്ഷമതയിൽ നിന്ന് സ്വതന്ത്രമായി ഫീൽഡ് ഫിനോടൈപ്പിംഗിന് ആവശ്യമായ ഉയർന്ന ത്രൂപുട്ട് നേടാൻ കർഷകരെ അനുവദിക്കുന്നു. ലീ തുടങ്ങിയവർ. (2012) ഉയർന്ന റെസല്യൂഷനുള്ള നൂറുകണക്കിന് സ്റ്റീരിയോ ഇമേജുകൾ UAV-അധിഷ്ഠിത സിസ്റ്റം ഉപയോഗിച്ച്, മേലാപ്പ് ഉയരവും നിലത്തിന് മുകളിലുള്ള ബയോമാസും ഉൾപ്പെടെയുള്ള ചോളം പാരാമീറ്ററുകൾ കണക്കാക്കാൻ ശേഖരിച്ചു. അവസാനമായി, യുവും മറ്റുള്ളവരും. (2017) UAV-കളിൽ നിന്ന് നിർണ്ണയിച്ചിരിക്കുന്ന വിളയുടെ ഉയരം ഭൂഗർഭ ബയോമാസ് (AGB) കണക്കാക്കൽ വർദ്ധിപ്പിക്കുമെന്ന് കണ്ടെത്തി.
വിള വളർച്ച നിരീക്ഷിക്കുന്നതിനുള്ള ഒരു സമീപനമാണ് വിള ഉപരിതല മാതൃകകൾ വികസിപ്പിക്കുക എന്ന ആശയം (ബെൻഡിഗ് et al., 2014, 2015; Holman et al., 2016; Panday, Shrestha, et al., 2020; Sumesh et al., 2021). ചെടികളുടെ ഉയരം പിടിച്ചെടുക്കാനും അവയുടെ വളർച്ച നിരീക്ഷിക്കാനും യുഎവിയിൽ നിന്ന് എടുത്ത ചിത്രങ്ങളുടെ സാധ്യത നിരവധി പഠനങ്ങൾ എടുത്തുകാണിച്ചു. ഉദാഹരണത്തിന്, Bendig et al. (2013) UAV ഉപയോഗിച്ച് 0.05 മീറ്ററിൽ താഴെയുള്ള ഉയർന്ന റെസല്യൂഷനുള്ള മൾട്ടി-ടെമ്പറൽ ക്രോപ്പ് ഉപരിതല മോഡലുകളുടെ വികസനം വിവരിച്ചു. വിള കണ്ടുപിടിക്കാനാണ് അവർ ലക്ഷ്യമിട്ടത്
വളർച്ചാ വ്യതിയാനവും വിള ചികിത്സ, കൃഷി, സമ്മർദ്ദം എന്നിവയെ ആശ്രയിക്കുന്നതും. ബെൻഡിഗ് തുടങ്ങിയവർ. (2014) ക്രോപ്പ് ഉപരിതല മോഡലുകളിൽ നിന്ന് വേർതിരിച്ചെടുത്ത സസ്യങ്ങളുടെ ഉയരം അടിസ്ഥാനമാക്കിയുള്ള പുതിയതും വരണ്ടതുമായ ബയോമാസ് കണക്കാക്കാൻ യുഎവികൾ ഉപയോഗിച്ചു, വായുവിലൂടെയുള്ള പ്ലാറ്റ്ഫോമുകൾ, ടെറസ്ട്രിയൽ ലേസർ സ്കാനിംഗ് എന്നിവയിൽ നിന്ന് വ്യത്യസ്തമായി, യുഎവികളിൽ നിന്നുള്ള ഉയർന്ന റെസല്യൂഷൻ ചിത്രങ്ങൾ വ്യത്യസ്ത വളർച്ചയ്ക്കായി സസ്യങ്ങളുടെ ഉയരം മോഡലിംഗിൻ്റെ കൃത്യത ഗണ്യമായി വർദ്ധിപ്പിക്കുമെന്ന് കണ്ടെത്തി. ഘട്ടങ്ങൾ. അതേ സിരയിൽ, Geipel et al. (2014) ഇമേജറി നേടുന്നതിനായി അവരുടെ ഗവേഷണത്തിൽ UAV-കൾ ഉപയോഗിച്ചു
സീസൺ ആരംഭം മുതൽ മധ്യം വരെയുള്ള മൂന്ന് വ്യത്യസ്ത വളർച്ചാ ഘട്ടങ്ങളിൽ ചോള ധാന്യ വിളവ് പ്രവചിക്കുന്നതിനുള്ള ഡാറ്റാസെറ്റുകൾ, ഏരിയൽ ഇമേജുകളും ക്രോപ്പ് ഉപരിതല മോഡലുകളും അടിസ്ഥാനമാക്കിയുള്ള സ്പെക്ട്രൽ, സ്പേഷ്യൽ മോഡലിംഗ് എന്നിവയുടെ സംയോജനമാണ് മധ്യകാല ചോള വിളവ് പ്രവചിക്കാൻ അനുയോജ്യമായ രീതിയെന്ന് നിഗമനം ചെയ്തു. അവസാനമായി, Gnadinger ¨ ഉം Schmidhalter (2017) ഉം UAV യുടെ കൃത്യമായ ഫിനോടൈപ്പിംഗിലെ പ്രയോജനം പരിശോധിക്കുകയും ഈ സാങ്കേതികവിദ്യയുടെ ഉപയോഗം ഫാം മാനേജ്മെൻ്റ് വർദ്ധിപ്പിക്കുകയും പ്രജനനത്തിനും കാർഷിക ആവശ്യങ്ങൾക്കുമായി ഫീൽഡ് പരീക്ഷണം സാധ്യമാക്കുമെന്നും എടുത്തുകാണിച്ചു. മൊത്തത്തിൽ, ക്ലസ്റ്റർ 2 ലെ പ്രസിദ്ധീകരണങ്ങൾ റിമോട്ടിലെ UAV-കളുടെ പ്രധാന ഗുണങ്ങളിൽ ശ്രദ്ധ കേന്ദ്രീകരിക്കുന്നതായി ഞങ്ങൾ നിരീക്ഷിക്കുന്നു.
ഫിനോടൈപ്പിംഗ്, വിളവ് കണക്കാക്കൽ, വിള ഉപരിതല മോഡലിംഗ്, സസ്യങ്ങളുടെ എണ്ണൽ. റിമോട്ട് സെൻസ്ഡ് ഡാറ്റയുടെ പ്രോസസ്സിംഗ് ഓട്ടോമേറ്റ് ചെയ്യാനും ഒപ്റ്റിമൈസ് ചെയ്യാനും കഴിയുന്ന റിമോട്ട് ഫിനോടൈപ്പിംഗിനായി പുതിയ രീതികൾ വികസിപ്പിച്ചുകൊണ്ട് ഭാവിയിലെ പഠനങ്ങൾക്ക് കൂടുതൽ ആഴത്തിൽ കുഴിക്കാൻ കഴിയും (Barabaschi et al., 2016; Liebisch et al., 2015; Mochida et al., 2015; S. Zhou et ., 2021). കൂടാതെ, UAV-കളിൽ ഘടിപ്പിച്ചിരിക്കുന്ന IoT സെൻസറുകളുടെ പ്രകടനവും അവയുടെ ചെലവ്, അധ്വാനം, വിളവ് കണക്കാക്കുന്നതിൻ്റെ കൃത്യത എന്നിവ തമ്മിലുള്ള വ്യാപാരവും ഗവേഷണം ചെയ്യേണ്ടതുണ്ട്.
ഭാവി (Ju & Son, 2018a, 2018b; Xie & Yang, 2020; Yue et al., 2018). ആത്യന്തികമായി, വിശ്വസനീയമായ വിവരങ്ങൾ സൃഷ്ടിക്കാനും കാർഷിക ഉൽപാദനത്തിൽ പരമാവധി കാര്യക്ഷമത വർദ്ധിപ്പിക്കാനും കർഷകരുടെ മാനുവൽ കൗണ്ടിംഗ് ജോലികൾ കുറയ്ക്കാനും കഴിയുന്ന കാര്യക്ഷമമായ ഇമേജ് പ്രോസസ്സിംഗ് രീതികൾ വികസിപ്പിക്കേണ്ടതുണ്ട് (RU Khan et al., 2021; Koh et al., 2021; Lin & Guo, 2020; C. Zhang et al., 2020).
ക്ലസ്റ്റർ 3. ഈ ക്ലസ്റ്ററിലെ പ്രസിദ്ധീകരണങ്ങൾ UAV പ്ലാറ്റ്ഫോമുകളിൽ ഉപയോഗിക്കുന്ന കാർഷിക വിഭവങ്ങളുടെ വിദൂര സംവേദനത്തിനായുള്ള വിവിധ തരം ഇമേജിംഗ് സിസ്റ്റങ്ങളെക്കുറിച്ച് ചർച്ച ചെയ്യുന്നു. ഇക്കാര്യത്തിൽ, തെർമൽ ഇമേജിംഗ് വിളനാശം തടയുന്നതിനും വരൾച്ചയുടെ സമ്മർദ്ദം നേരത്തേ കണ്ടെത്തുന്നതിനും ഉപരിതല താപനില നിരീക്ഷിക്കാൻ അനുവദിക്കുന്നു (Awais et al., 2022; García-Tejero et al., 2018; Sankaran et al., 2015; Santesteban et al., 2017; യോം, 2021). ബലൂജ തുടങ്ങിയവർ. (2012) വിമാനത്തിൽ മൾട്ടിസ്പെക്ട്രൽ, തെർമൽ ക്യാമറകളുടെ ഉപയോഗം ഉറപ്പിച്ചു
ഉയർന്ന മിഴിവുള്ള ചിത്രങ്ങൾ നേടാനും മുന്തിരിവള്ളിയുടെ ജലത്തിൻ്റെ അവസ്ഥ വിലയിരുത്താനും UAV ഗവേഷകരെ പ്രാപ്തമാക്കി. റിമോട്ട് സെൻസിംഗ് ഡാറ്റ ഉപയോഗിച്ച് നോവൽ വാട്ടർ ഷെഡ്യൂളിംഗ് മോഡലുകൾ വികസിപ്പിക്കുന്നതിന് ഇത് ഉപയോഗപ്രദമാകും (Baluja et al., 2012). അത് കാരണത്താൽ
UAV-കളുടെ പരിമിതമായ ലോഡ് കപ്പാസിറ്റി, റിബെയ്റോ-ഗോംസ് തുടങ്ങിയവ. (2017) പ്ലാൻ്റുകളിലെ ജല സമ്മർദ്ദം നിർണ്ണയിക്കാൻ UAVS-ലേക്ക് അൺകൂൾഡ് തെർമൽ ക്യാമറകൾ സംയോജിപ്പിക്കുന്നത് പരിഗണിച്ചു, ഇത് UAV-കളെ പരമ്പരാഗത സാറ്റലൈറ്റ് അധിഷ്ഠിത റിമോട്ട് സെൻസിംഗ്, കൂൾഡ് തെർമൽ ക്യാമറകൾ ഘടിപ്പിച്ച UAV-കൾ എന്നിവയേക്കാൾ കൂടുതൽ കാര്യക്ഷമവും പ്രവർത്തനക്ഷമവുമാക്കുന്നു. രചയിതാക്കൾ പറയുന്നതനുസരിച്ച്, തണുപ്പിക്കാത്ത തെർമൽ ക്യാമറകൾ തണുപ്പിച്ച ക്യാമറകളേക്കാൾ ഭാരം കുറഞ്ഞതാണ്, ഉചിതമായ കാലിബ്രേഷൻ ആവശ്യമാണ്. ഗോൺസാലസ്-ഡുഗോ et al. (2014) തെർമൽ ഇമേജറി ജലത്തിൻ്റെ അവസ്ഥ വിലയിരുത്തുന്നതിനും സിട്രസ് തോട്ടങ്ങൾക്കിടയിലും ഉള്ളിലും ജല സമ്മർദ്ദം അളക്കുന്നതിനും വിള ജല സമ്മർദ്ദ സൂചികകളുടെ സ്പേഷ്യൽ മാപ്പുകൾ ഫലപ്രദമായി സൃഷ്ടിക്കുന്നുവെന്ന് കാണിച്ചു. ഗോൺസാലസ്-ഡുഗോ et al. (2013) കൂടാതെ Santesteban et al. (2017) ഒരു വാണിജ്യ തോട്ടത്തിൻ്റെയും മുന്തിരിത്തോട്ടത്തിൻ്റെയും ജലത്തിൻ്റെ വ്യതിയാനം കണക്കാക്കാൻ ഉയർന്ന റെസല്യൂഷൻ UAV തെർമൽ ഇമേജറിയുടെ ഉപയോഗം അന്വേഷിച്ചു.
പരമ്പരാഗത RGB (ചുവപ്പ്, പച്ച, നീല) ചിത്രങ്ങളുമായി താരതമ്യപ്പെടുത്തുമ്പോൾ മൾട്ടിസ്പെക്ട്രൽ ഇമേജിംഗിന് വലിയ ഡാറ്റ നൽകാൻ കഴിയും (Ad˜ ao et al., 2017; Navia et al., 2016). ഈ സ്പെക്ട്രൽ ഡാറ്റ, സ്പേഷ്യൽ ഡാറ്റയ്ക്കൊപ്പം, വർഗ്ഗീകരണം, മാപ്പിംഗ്, പ്രവചനം, പ്രവചനം, കണ്ടെത്തൽ ആവശ്യങ്ങൾ എന്നിവയിൽ സഹായിക്കും (ബെർണി et al., 2009b). Candiago et al. (2015), UAV അടിസ്ഥാനമാക്കിയുള്ള മൾട്ടിസ്പെക്ട്രൽ ഇമേജിംഗ്, വിശ്വസനീയവും കാര്യക്ഷമവുമായ ഒരു വിഭവമെന്ന നിലയിൽ വിളകളുടെ വിലയിരുത്തലിനും കൃത്യമായ കൃഷിക്കും വൻതോതിൽ സംഭാവന നൽകും. കൂടാതെ,
ഖാലിഖ് തുടങ്ങിയവർ. (2019) ഉപഗ്രഹവും UAV അടിസ്ഥാനമാക്കിയുള്ള മൾട്ടിസ്പെക്ട്രൽ ഇമേജിംഗും തമ്മിൽ താരതമ്യം ചെയ്തു. യുഎവി അധിഷ്ഠിത ചിത്രങ്ങൾ മുന്തിരിത്തോട്ടത്തിൻ്റെ വ്യതിയാനവും വിള മേലാപ്പുകളെ പ്രതിനിധീകരിക്കുന്നതിനുള്ള വീർ മാപ്പുകളും വിവരിക്കുന്നതിൽ കൂടുതൽ കൃത്യത വരുത്തി. ചുരുക്കത്തിൽ, ഈ ക്ലസ്റ്ററിലെ ലേഖനങ്ങൾ കാർഷിക യുഎവികളിൽ തെർമൽ, മൾട്ടിസ്പെക്ട്രൽ ഇമേജിംഗ് സെൻസറുകൾ സംയോജിപ്പിക്കുന്നതിനെക്കുറിച്ച് ചർച്ച ചെയ്യുന്നു. അതനുസരിച്ച്, തെർമൽ, മൾട്ടിസ്പെക്ട്രൽ ഇമേജിംഗ് എങ്ങനെ AI-യുമായി സംയോജിപ്പിക്കാമെന്ന് മനസിലാക്കാൻ കൂടുതൽ ഗവേഷണം ആവശ്യമാണ്.
ചെടികളുടെ സമ്മർദ്ദം കണ്ടെത്തുന്നതിനുള്ള സാങ്കേതിക വിദ്യകൾ (ഉദാഹരണത്തിന്, ആഴത്തിലുള്ള പഠനം) (Ampatzidis et al., 2020; Ampatzidis & Partel, 2019; Jung et al., 2021; Santesteban et al., 2017; Syeda et al., 2021). അത്തരം സ്ഥിതിവിവരക്കണക്കുകൾ കൂടുതൽ കാര്യക്ഷമവും കൃത്യവുമായ കണ്ടെത്തലും സസ്യവളർച്ച, സമ്മർദ്ദം, ഫിനോളജി എന്നിവയുടെ നിരീക്ഷണവും ഉറപ്പാക്കാൻ സഹായിക്കും (Buters et al., 2019; Cao et al., 2020; Neupane & BaysalGurel, 2021; L. Zhou et al., 2020).
ക്ലസ്റ്റർ 4. കാർഷിക രീതികളെ പിന്തുണയ്ക്കുന്നതിൽ സ്പെക്ട്രൽ ഇമേജിംഗിൻ്റെയും ഹൈപ്പർസ്പെക്ട്രൽ ഇമേജിംഗിൻ്റെയും നിർണായക പങ്കിനെ ചുറ്റിപ്പറ്റിയുള്ള ഏഴ് പേപ്പറുകൾ ഈ ക്ലസ്റ്ററിൽ അടങ്ങിയിരിക്കുന്നു. ഹൈപ്പർസ്പെക്ട്രൽ ഇമേജിംഗ് ഒരു റിമോട്ട് സെൻസിംഗ് രീതിയായി സ്വയം സ്ഥാപിച്ചു, അത് ഭൗമ വ്യവസ്ഥയുടെ അളവ് വിലയിരുത്തൽ പ്രാപ്തമാക്കുന്നു (Schaepman et al., 2009).കൂടുതൽ കൃത്യമായി പറഞ്ഞാൽ, ഇത് ഉപരിതല വസ്തുക്കളുടെ തിരിച്ചറിയൽ, (ആപേക്ഷിക) സാന്ദ്രതകളുടെ അളവ് എന്നിവയെ പ്രാപ്തമാക്കുന്നു. ഉപരിതല ഘടക അനുപാതങ്ങളുടെ നിയമനം
മിക്സഡ് പിക്സലുകൾക്കുള്ളിൽ (Kirsch et al., 2018; Zhao et al., 2022). മറ്റൊരു വിധത്തിൽ പറഞ്ഞാൽ, ഹൈപ്പർസ്പെക്ട്രൽ സംവിധാനങ്ങൾ നൽകുന്ന ഉയർന്ന സ്പെക്ട്രൽ റെസലൂഷൻ, സസ്യാഹാര ഗുണങ്ങൾ അല്ലെങ്കിൽ ഇല ജലത്തിൻ്റെ അളവ് (Suomalainen et al., 2014) പോലുള്ള വിവിധ പാരാമീറ്ററുകളുടെ കൂടുതൽ കൃത്യമായ കണക്കുകൂട്ടലുകൾ സാധ്യമാക്കുന്നു. ഈ ക്ലസ്റ്ററിലെ ഗവേഷകർ അത്തരം സംവിധാനങ്ങളുടെ വിവിധ വശങ്ങൾ അന്വേഷിച്ചു. മറ്റുള്ളവരിൽ, ആസെൻ et al. (2015b) ഭാരം കുറഞ്ഞതിൽ നിന്ന് ത്രിമാന ഹൈപ്പർസ്പെക്ട്രൽ വിവരങ്ങൾ നേടുന്നതിന് ഒരു അദ്വിതീയ സമീപനം വാഗ്ദാനം ചെയ്തു
സസ്യങ്ങളുടെ നിരീക്ഷണത്തിനായി UAV-കളിൽ ഉപയോഗിക്കുന്ന സ്നാപ്പ്ഷോട്ട് ക്യാമറകൾ. ലൂസിയർ തുടങ്ങിയവർ. (2014) ഒരു നോവൽ ഹൈപ്പർസ്പെക്ട്രൽ UAS-ൻ്റെ രൂപകൽപ്പന, വികസനം, ആകാശ പ്രവർത്തനങ്ങൾ എന്നിവയും അതോടൊപ്പം ശേഖരിച്ച ഇമേജ് ഡാറ്റയുടെ കാലിബ്രേഷൻ, വിശകലനം, വ്യാഖ്യാനം എന്നിവയും ചർച്ച ചെയ്തു. അവസാനമായി, ഹോങ്കവാര et al. (2013b) ഫാബ്രിപെറോട്ട് ഇൻ്റർഫെറോമീറ്റർ അടിസ്ഥാനമാക്കിയുള്ള സ്പെക്ട്രൽ ഇമേജുകൾക്കായി സമഗ്രമായ ഒരു പ്രോസസ്സിംഗ് സമീപനം വികസിപ്പിച്ചെടുത്തു, കൂടാതെ കൃത്യമായ കൃഷിക്കായി ഒരു ബയോമാസ് എസ്റ്റിമേറ്റ് നടപടിക്രമത്തിൽ അതിൻ്റെ ഉപയോഗം കാണിച്ചു. സെൻസർ സാങ്കേതികവിദ്യകളിലെ സാങ്കേതിക മെച്ചപ്പെടുത്തലുകളുടെ ആവശ്യകത ഊന്നിപ്പറയുന്നതും (Aasen et al., 2015b) കൂടാതെ അനുബന്ധ സാങ്കേതികവിദ്യകൾ, പ്രത്യേകിച്ച് വലിയ ഡാറ്റയും അനലിറ്റിക്സും (Ang & Seng, 2021; റാഡോഗ്ലോവ്, 2020; -ഗ്രാമാറ്റിക്കിസ് et al., 2019; Shakoor et al., 2020). സ്മാർട്ട് അഗ്രികൾച്ചറലിൽ നടപ്പിലാക്കിയ വിവിധ സെൻസറുകൾ സൃഷ്ടിച്ച അനുദിനം വളരുന്ന ഡാറ്റയിൽ നിന്നാണ് രണ്ടാമത്തേത് പ്രധാനമായും ഉരുത്തിരിഞ്ഞത് (C. Li & Niu, 2022; A. Rejeb et al., 2021; Y. Su & Wang, XNUMX).
ക്ലസ്റ്റർ 5. ഈ ക്ലസ്റ്ററിലെ പ്രസിദ്ധീകരണങ്ങൾ ഡ്രോണുകളെ അടിസ്ഥാനമാക്കിയുള്ള 3Dമാപ്പിംഗ് ആപ്ലിക്കേഷനുകൾ പരിശോധിച്ചു. 3D മാപ്പിംഗിനായി ഡ്രോണുകൾ ഉപയോഗിക്കുന്നത് സങ്കീർണ്ണമായ ഫീൽഡ് വർക്ക് ലഘൂകരിക്കാനും കാര്യക്ഷമത ഗണ്യമായി വർദ്ധിപ്പിക്കാനും കഴിയും (Torres-Sanchez et al., 2015). ക്ലസ്റ്ററിലെ അഞ്ച് ലേഖനങ്ങൾ പ്രധാനമായും സസ്യ നിരീക്ഷണ ആപ്ലിക്കേഷനുകളിൽ ശ്രദ്ധ കേന്ദ്രീകരിച്ചു. ഉദാഹരണത്തിന്, മേലാപ്പ് വിസ്തീർണ്ണം, മരത്തിൻ്റെ ഉയരം, കിരീടത്തിൻ്റെ അളവ് എന്നിവയെക്കുറിച്ചുള്ള ത്രിമാന ഡാറ്റ ലഭിക്കുന്നതിന്, ടോറസ്-സാഞ്ചസ് ô et al. (2015) ഡിജിറ്റൽ ഉപരിതല മോഡലുകളും തുടർന്ന് ഒബ്ജക്റ്റ്-ബേസ്ഡ് ഇമേജ് അനാലിസിസ് (OBIA) സമീപനങ്ങളും സൃഷ്ടിക്കാൻ UAV സാങ്കേതികവിദ്യ ഉപയോഗിച്ചു. കൂടാതെ, Zarco-Tejada et al. (2014) UAV സാങ്കേതികവിദ്യയും ത്രിമാന ഫോട്ടോ പുനർനിർമ്മാണ രീതികളും സംയോജിപ്പിച്ച് മരത്തിൻ്റെ ഉയരം കണക്കാക്കി. ജിമെനെസ്-ബ്രെനെസ് ലോപ്പസ്-ഗ്രനാഡോസ്, ഡി കാസ്ട്രോ, തുടങ്ങിയവർ. (2017) നൂതന OBIA മെത്തഡോളജിയുമായി UAV സാങ്കേതികവിദ്യ സമന്വയിപ്പിച്ച് ഡസൻ കണക്കിന് ഒലിവ് മരങ്ങളുടെ മൾട്ടി-ടെമ്പറൽ, 3D നിരീക്ഷണത്തിനായി ഒരു പുതിയ പ്രക്രിയ പ്രദർശിപ്പിച്ചു. ഈ ക്ലസ്റ്ററിലെ ഭാവി പ്രവർത്തനങ്ങൾക്കുള്ള രസകരമായ പാതകളിൽ ഒന്നുകിൽ കറൻ്റ് മെച്ചപ്പെടുത്തൽ ഉൾപ്പെടുന്നു
OBIA (de Castro et al., 2014, 2017; Ventura et al., 2016; Jaud et al., 2018) ഡിജിറ്റൽ ഉപരിതല മോഡലിംഗ് ആവശ്യങ്ങൾക്ക് (Ajayi et al., 2020; Jaud et al., 2018) രീതിശാസ്ത്രങ്ങൾ (Zarco-Tejada et al., 2015). , 2015), ഫോട്ടോ പുനർനിർമ്മാണം അല്ലെങ്കിൽ പുതിയ രീതികൾ വികസിപ്പിക്കൽ (Díaz-Varela et al., XNUMX; Torres-S´ anchez et al., XNUMX).
ക്ലസ്റ്റർ 6. കാർഷിക നിരീക്ഷണത്തിൽ ഡ്രോണുകളുടെ പങ്കിനെ കുറിച്ച് ഈ ക്ലസ്റ്റർ ചർച്ച ചെയ്യുന്നു. സാറ്റലൈറ്റ്, എയർക്രാഫ്റ്റ് ഇമേജിംഗിൻ്റെ പോരായ്മകൾ പൂർത്തീകരിക്കാനും മറികടക്കാനും യുഎവികൾക്ക് കഴിയും. ഉദാഹരണത്തിന്, കുറഞ്ഞ ഇന്ധനമോ പൈലറ്റിംഗ് വെല്ലുവിളികളോ ഉള്ള തത്സമയ ഇമേജിംഗിന് സമീപം ഉയർന്ന റെസല്യൂഷൻ നൽകാൻ അവർക്ക് കഴിയും, ഇത് സ്ഥിരവും തത്സമയ നിരീക്ഷണവും തീരുമാനങ്ങൾ എടുക്കുന്നതിലെ മെച്ചപ്പെടുത്തലുകളും ഉണ്ടാക്കുന്നു (S. Herwitz et al., 2004). UAV-കളുടെ മറ്റൊരു പ്രധാന സംഭാവന, കൃത്യമായ കൃഷി അല്ലെങ്കിൽ സൈറ്റ്-നിർദ്ദിഷ്ട കൃഷിയ്ക്കായി സൈറ്റ്-നിർദ്ദിഷ്ട ഡാറ്റ അവരുടെ ഉയർന്ന റെസല്യൂഷനായി നൽകാനുള്ള കഴിവാണ്, വിവിധ പാരാമീറ്ററുകളെക്കുറിച്ചുള്ള വിശദമായ ഡാറ്റ കർഷകരെ ഭൂമിയെ ഏകതാനമായ ഭാഗങ്ങളായി വിഭജിക്കാനും അതിനനുസരിച്ച് കൈകാര്യം ചെയ്യാനും പ്രാപ്തമാക്കുന്നു (ഹണ്ട് et al. 2010; CC Lelong et al., 2008; ഇത്തരം UAV അടിസ്ഥാനമാക്കിയുള്ള കാർഷിക നിരീക്ഷണത്തിന് ഭക്ഷ്യസുരക്ഷാ നിരീക്ഷണത്തെയും തീരുമാനമെടുക്കുന്നതിനെയും പിന്തുണയ്ക്കാൻ കഴിയും (SR Herwitz et al., 2012). കാർഷിക നിരീക്ഷണത്തിൽ ഗവേഷണം പുരോഗമിക്കുന്നതിന്, സെൻസറുകൾ, യുഎവികൾ, മറ്റ് അനുബന്ധ സാങ്കേതികവിദ്യകൾ എന്നിവയിലെ മെച്ചപ്പെടുത്തലുകൾ മാത്രമല്ല, അവയുടെ ആശയവിനിമയ, ഡാറ്റ കൈമാറ്റ രീതികളും ആവശ്യമാണ് (Ewing et al., 2004; Shuai et al., 2020), മാത്രമല്ല വിവിധ ഡ്രോണുകളുമായി സംയോജിപ്പിക്കുകയും ചെയ്യുന്നു. നിരീക്ഷണം, കാർഷിക നിരീക്ഷണം, തീരുമാനങ്ങൾ എടുക്കൽ തുടങ്ങിയ സ്മാർട് കൃഷിയുമായി ബന്ധപ്പെട്ട് വ്യത്യസ്തമായ ജോലികൾ ഒപ്റ്റിമൈസ് ചെയ്യുന്നതിനുള്ള സാങ്കേതികവിദ്യകൾ ഉയർന്ന സാധ്യതയുള്ള ഗവേഷണ മേഖലയാണ് (Alsamhi et al., 2019; Popescu et al., 2021; Vuran et al., 2020). ഇക്കാര്യത്തിൽ, IoT, WSN-കൾ, ബിഗ് ഡാറ്റ എന്നിവ രസകരമായ പൂരക കഴിവുകൾ വാഗ്ദാനം ചെയ്യുന്നു (വാൻ ഡെർ മെർവെ എറ്റ്., 2018). നടപ്പാക്കൽ ചെലവുകൾ, ചെലവ് ലാഭിക്കൽ, ഊർജ്ജ കാര്യക്ഷമത, ഡാറ്റ സുരക്ഷ എന്നിവ അത്തരം സംയോജനത്തിനായി ഗവേഷണം നടത്താത്ത മേഖലകളിൽ ഉൾപ്പെടുന്നു (മസ്റൂർ et al., 2020).
രാജ്യങ്ങളും അക്കാദമിക് സ്ഥാപനങ്ങളും
അവസാന ഘട്ടത്തിൽ ഉത്ഭവ രാജ്യത്തിൻ്റെ അന്വേഷണവും രചയിതാക്കളുടെ അക്കാദമിക് അഫിലിയേഷനുകളും ഉൾപ്പെടുന്നു. ഈ വിശകലനത്തിലൂടെ, കൃഷിയിൽ ഡ്രോണുകളുടെ പ്രയോഗത്തിന് സംഭാവന നൽകുന്ന പണ്ഡിതന്മാരുടെ ഭൂമിശാസ്ത്രപരമായ വിതരണം നന്നായി മനസ്സിലാക്കാൻ ഞങ്ങൾ ലക്ഷ്യമിടുന്നു. രാജ്യങ്ങളുടെയും അക്കാദമിക് സ്ഥാപനങ്ങളുടെയും വൈവിധ്യം ശ്രദ്ധിക്കുന്നത് ശ്രദ്ധേയമാണ്. ഒരു രാജ്യത്തിൻ്റെ വീക്ഷണകോണിൽ, യുഎസ്എ, ചൈന, ഇന്ത്യ, ഇറ്റലി എന്നീ രാജ്യങ്ങളാണ് പ്രസിദ്ധീകരണങ്ങളുടെ എണ്ണത്തിൽ പട്ടികയിൽ ഒന്നാം സ്ഥാനത്ത് നിൽക്കുന്നത് (പട്ടിക 7). നിലവിൽ
കാർഷിക ഡ്രോണുകളെക്കുറിച്ചുള്ള ഗവേഷണം പ്രധാനമായും വടക്കേ അമേരിക്കൻ, ഏഷ്യൻ രാജ്യങ്ങളിൽ കേന്ദ്രീകരിച്ചിരിക്കുന്നു, പ്രധാനമായും കൃത്യമായ കാർഷിക ആപ്ലിക്കേഷനുകളിലെ ഉയർന്ന ഇടപെടൽ കാരണം. ഉദാഹരണത്തിന്, യുഎസ്എയിൽ, കാർഷിക ഡ്രോണുകളുടെ വിപണി 841.9-ൽ 2020 ദശലക്ഷം യുഎസ്ഡി ആയി കണക്കാക്കപ്പെട്ടിരിക്കുന്നു, ഇത് ആഗോള വിപണി വിഹിതത്തിൻ്റെ ഏകദേശം 30% വരും (റിപ്പോർട്ട് ലിങ്കർ, 2021). ലോകത്തിലെ ഏറ്റവും വലിയ സമ്പദ്വ്യവസ്ഥയായി റാങ്ക് ചെയ്യുന്ന ചൈന, 2.6-ൽ ഏകദേശം 2027 ബില്യൺ യുഎസ് ഡോളറിൻ്റെ വിപണി വലുപ്പത്തിൽ എത്തുമെന്ന് പ്രവചിക്കപ്പെടുന്നു. ഉൽപ്പാദനക്ഷമതാ പ്രശ്നങ്ങൾ തരണം ചെയ്യാനും മികച്ച വിളവ്, തൊഴിൽ ലഘൂകരണം, കുറഞ്ഞ ഉൽപ്പാദന ഉൽപ്പാദനം എന്നിവ നേടാനും ഈ രാജ്യം കാർഷിക ഡ്രോണുകൾക്കായി അഭ്യർത്ഥിക്കുന്നു. എന്നിരുന്നാലും, ചൈനയിൽ സാങ്കേതികവിദ്യ സ്വീകരിക്കുന്നത് ജനസംഖ്യാ വലിപ്പം, നിലവിലുള്ള വിള പരിപാലന രീതികൾ നവീകരിക്കേണ്ടതും മെച്ചപ്പെടുത്തേണ്ടതിൻ്റെ ആവശ്യകതയും പോലുള്ള ഘടകങ്ങളാൽ നയിക്കപ്പെടുന്നു.
ഏറ്റവും മികച്ച ഉൽപ്പാദനക്ഷമതയുള്ള രാജ്യങ്ങളും സംഭാവന ചെയ്യുന്ന സർവ്വകലാശാലകളും/ഓർഗനൈസേഷനുകളും
കാർഷിക ഡ്രോണുമായി ബന്ധപ്പെട്ട ഗവേഷണം.
| റാങ്ക് | രാജ്യങ്ങൾ |
| 1 | യുഎസ്എ |
| 2 | ചൈന |
| 3 | ഇന്ത്യ |
| 4 | ഇറ്റലി |
| 5 | സ്പെയിൻ |
| 6 | ജർമ്മനി |
| 7 | ബ്രസീൽ |
| 8 | ആസ്ട്രേലിയ |
| 9 | ജപ്പാൻ |
| 10 | യുണൈറ്റഡ് കിംഗ്ഡം |
| റാങ്ക് | സർവ്വകലാശാലകൾ/ഓർഗനൈസേഷനുകൾ |
| 1 | ചൈനീസ് അക്കാദമി ഓഫ് സയൻസസ് |
| 2 | പീപ്പിൾസ് റിപ്പബ്ലിക് ഓഫ് ചൈനയുടെ കൃഷി മന്ത്രാലയം |
| 3 | സുപ്പീരിയർ കൗൺസിൽ ഓഫ് സയന്റിഫിക് ഇൻവെസ്റ്റിഗേഷൻ |
| 4 | ടെക്സസ് എ & എം യൂണിവേഴ്സിറ്റി |
| 5 | ചൈന കാർഷിക സർവ്വകലാശാല |
| 6 | USDA അഗ്രികൾച്ചറൽ റിസർച്ച് സർവീസ് |
| 7 | CSIC - ഇൻസ്റ്റിറ്റ്യൂട്ട് ഡി അഗ്രികൾച്ചറ സോസ്റ്റെനിബിൾ ഐഎഎസ് |
| 8 | പർഡ്യൂ സർവ്വകലാശാല |
| 9 | ദേശീയ ഗവേഷണ കൗൺസിൽ |
| 10 | സൗത്ത് ചൈന അഗ്രികൾച്ചറൽ യൂണിവേഴ്സിറ്റി |
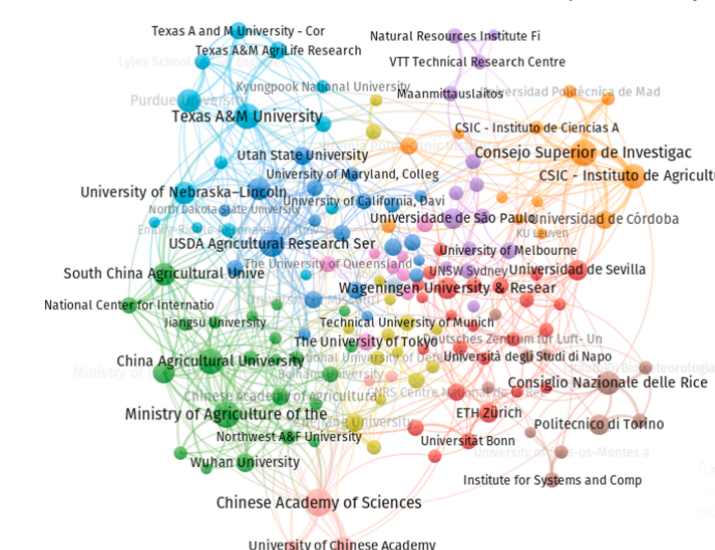
ഒരു യൂണിവേഴ്സിറ്റി, ഓർഗനൈസേഷണൽ വീക്ഷണകോണിൽ, പ്രസിദ്ധീകരണങ്ങളുടെ എണ്ണത്തിൽ ചൈനീസ് അക്കാദമി ഓഫ് സയൻസസ് പട്ടികയിൽ ഒന്നാമതാണ്, പീപ്പിൾസ് റിപ്പബ്ലിക് ഓഫ് ചൈനയിലെ കൃഷി മന്ത്രാലയവും കോൺസെജോ സുപ്പീരിയർ ഡി ഇൻവെസ്റ്റിഗേഷ്യൻസ് സെൻ്റിഫിക്കാസും തൊട്ടുപിന്നിൽ. ചൈനീസ് അക്കാദമി ഓഫ് സയൻസസിനെ പ്രതിനിധീകരിക്കുന്നത് എഴുത്തുകാരായ ലിയാവോ സിയാവോഹാനും ലി ജുനും ആണ്; പീപ്പിൾസ് റിപ്പബ്ലിക് ഓഫ് ചൈനയിലെ കൃഷി മന്ത്രാലയത്തെ പ്രതിനിധീകരിക്കുന്നത് ഹാൻ വെൻ്റിങ് ആണ്; കൂടാതെ Consejo Superior de Investigaciones Científicas പ്രതിനിധീകരിക്കുന്നത് ലോപ്പസ്-ഗ്രാനഡോസ്, എഫ്., പെന, ˜ ജോസ് മരിയ എസ്. യു.എസ്.എ.യിൽ നിന്നുള്ള, ടെക്സസ് A&M യൂണിവേഴ്സിറ്റി, പർഡ്യൂ യൂണിവേഴ്സിറ്റി തുടങ്ങിയ സർവ്വകലാശാലകൾ അവരുടെ കണ്ടെത്തലാണ്.
പരാമർശിക്കുക. ഏറ്റവുമധികം പ്രസിദ്ധീകരണങ്ങളുള്ള സർവ്വകലാശാലകളും അവയുടെ ബന്ധങ്ങളും ചിത്രം 4-ൽ കാണിച്ചിരിക്കുന്നു. കൂടാതെ, ഈ ലിസ്റ്റിൽ കോൺസിഗ്ലിയോ നാസിയോണലെ ഡെല്ലെ റൈസർചെ, കോൺസെജോ സുപ്പീരിയർ ഡി ഇൻവെസ്റ്റിഗേസിയോൺസ് സെൻ്റിഫിക്കാസ് തുടങ്ങിയ സ്ഥാപനങ്ങൾ ഉൾപ്പെടുന്നു, അവ ശാസ്ത്ര ഗവേഷണത്തിൽ സജീവമാണ്. .
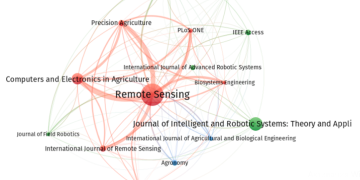
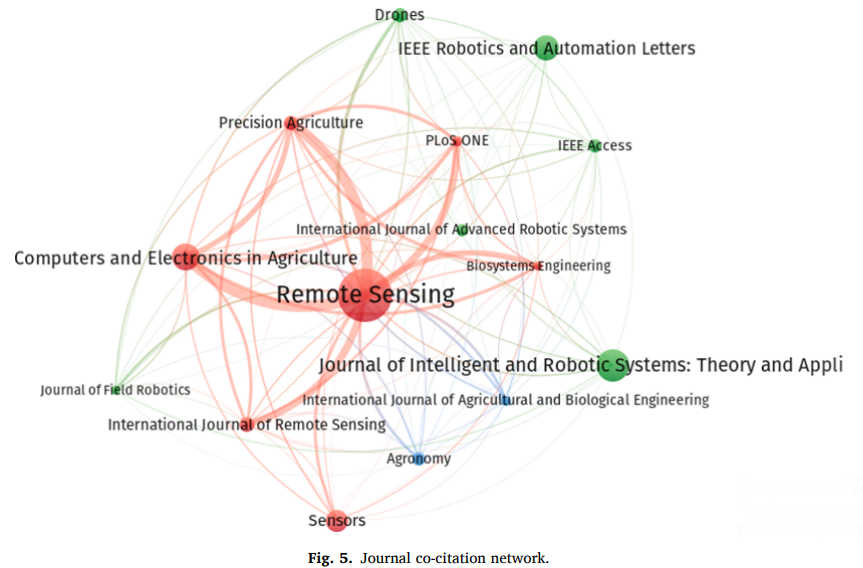
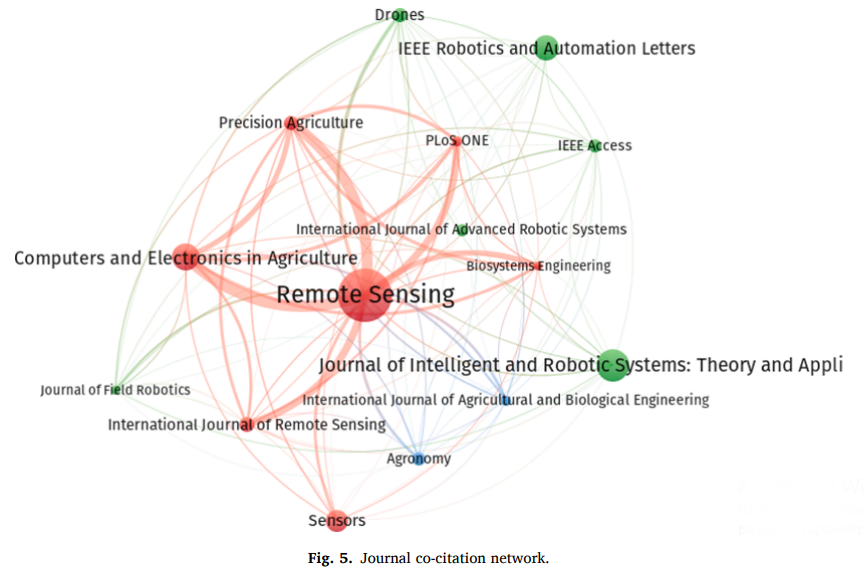
ഞങ്ങളുടെ തിരഞ്ഞെടുപ്പിൽ ലഭ്യമായ എല്ലാ ഡാറ്റയും ഉൾക്കൊള്ളുന്ന വൈവിധ്യമാർന്ന ജേണലുകൾ ഉൾപ്പെടുന്നു. പട്ടിക 8-ൽ കാണിച്ചിരിക്കുന്നതുപോലെ, 258 ലേഖനങ്ങളുള്ള റിമോട്ട് സെൻസിംഗ് മുകളിൽ റാങ്ക് ചെയ്യുന്നു, തുടർന്ന് ജേണൽ ഓഫ് ഇൻ്റലിജൻ്റ് ആൻഡ് റോബോട്ടിക് സിസ്റ്റംസ്: 126 ഉള്ള തിയറിയും ആപ്ലിക്കേഷനുകളും, 98 ലേഖനങ്ങളുള്ള കമ്പ്യൂട്ടർ ആൻഡ് ഇലക്ട്രോണിക്സ് ഇൻ അഗ്രികൾച്ചർ. റിമോട്ട് സെൻസിംഗ് പ്രധാനമായും ഡ്രോണുകളുടെ പ്രയോഗത്തിലും വികസനത്തിലും ശ്രദ്ധ കേന്ദ്രീകരിക്കുമ്പോൾ, കാർഷിക മേഖലയിലെ കമ്പ്യൂട്ടറുകളും ഇലക്ട്രോണിക്സും പ്രധാനമായും കമ്പ്യൂട്ടർ ഹാർഡ്വെയർ, സോഫ്റ്റ്വെയർ, ഇലക്ട്രോണിക്സ്, കാർഷിക മേഖലയിലെ നിയന്ത്രണ സംവിധാനങ്ങൾ എന്നിവയിലെ പുരോഗതിയെ ഉൾക്കൊള്ളുന്നു. 87 പ്രസിദ്ധീകരണങ്ങളുള്ള IEEE റോബോട്ടിക്സ്, ഓട്ടോമേഷൻ ലെറ്ററുകൾ, 34 പ്രസിദ്ധീകരണങ്ങളുള്ള IEEE ആക്സസ് എന്നിവ പോലുള്ള ക്രോസ്-ഏരിയ ഔട്ട്ലെറ്റുകളും ഈ മേഖലയിലെ പ്രധാന ഔട്ട്ലെറ്റുകളാണ്. മികച്ച പതിനഞ്ച് ഔട്ട്ലെറ്റുകൾ 959 രേഖകളുമായി സാഹിത്യത്തിന് സംഭാവന ചെയ്തിട്ടുണ്ട്, ഇത് എല്ലാ പ്രസിദ്ധീകരണങ്ങളുടെയും ഏകദേശം 20.40% ആണ്. പ്രസിദ്ധീകരണങ്ങൾ തമ്മിലുള്ള പ്രാധാന്യവും സമാനതയും പരിശോധിക്കാൻ ഒരു ജേണൽ കോ-സൈറ്റേഷൻ വിശകലനം നമ്മെ പ്രാപ്തരാക്കുന്നു. ചിത്രം 5-ൽ കാണിച്ചിരിക്കുന്നതുപോലെ കോ-സൈറ്റേഷൻ വിശകലനം മൂന്ന് ക്ലസ്റ്ററുകൾ നൽകുന്നു. റെഡ് ക്ലസ്റ്ററിൽ റിമോട്ട് സെൻസിംഗ്, കമ്പ്യൂട്ടർ, ഇലക്ട്രോണിക്സ് ഇൻ അഗ്രികൾച്ചർ, സെൻസറുകൾ, തുടങ്ങിയ ജേണലുകൾ അടങ്ങിയിരിക്കുന്നു.
കൂടാതെ ഇൻ്റർനാഷണൽ ജേണൽ ഓഫ് റിമോട്ട് സെൻസിംഗ്. ഈ ഔട്ട്ലെറ്റുകളെല്ലാം റിമോട്ട് സെൻസിംഗ്, പ്രിസിഷൻ അഗ്രികൾച്ചർ മേഖലകളിൽ വളരെ പ്രശസ്തമായ ജേണലുകളാണ്. ഗ്രീൻ ക്ലസ്റ്ററിൽ റോബോട്ടിക്സ് കൈകാര്യം ചെയ്യുന്ന ജേണലുകൾ അടങ്ങിയിരിക്കുന്നു, അതായത് ജേണൽ ഓഫ് ഇൻ്റലിജൻ്റ് ആൻഡ് റോബോട്ടിക് സിസ്റ്റംസ്: തിയറി ആൻഡ് ആപ്ലിക്കേഷനുകൾ, ഐഇഇഇ റോബോട്ടിക്സ് ആൻഡ് ഓട്ടോമേഷൻ ലെറ്ററുകൾ, ഐഇഇഇ ആക്സസ്, ഡ്രോണുകൾ. ഈ ഔട്ട്ലെറ്റുകൾ കൂടുതലും ഓട്ടോമേഷനെക്കുറിച്ചുള്ള പേപ്പറുകൾ പ്രസിദ്ധീകരിക്കുകയും കാർഷിക എഞ്ചിനീയർമാർക്ക് ഉപയോഗപ്രദവുമാണ്. അഗ്രോണമി, ഇൻറർനാഷണൽ ജേർണൽ ഓഫ് അഗ്രികൾച്ചറൽ ആൻഡ് ബയോളജിക്കൽ എഞ്ചിനീയറിംഗ് തുടങ്ങിയ അഗ്രോണമി, അഗ്രിക്കൾച്ചറൽ എഞ്ചിനീയറിംഗ് എന്നിവയുമായി ബന്ധപ്പെട്ട ജേണലുകളാണ് അന്തിമ ക്ലസ്റ്റർ രൂപീകരിക്കുന്നത്.
കാർഷിക ഡ്രോണുമായി ബന്ധപ്പെട്ട ഗവേഷണത്തിലെ മികച്ച 15 ജേണലുകൾ.
| റാങ്ക് | ജേർണൽ | എണ്ണുക |
| 1 | വിദൂര സംവേദനം | 258 |
| 2 | ജേണൽ ഓഫ് ഇൻ്റലിജൻ്റ് ആൻഡ് റോബോട്ടിക് സിസ്റ്റംസ്: തിയറി ആൻഡ് അപ്ലിക്കേഷനുകൾ | 126 |
| 3 | കൃഷിയിൽ കമ്പ്യൂട്ടറുകളും ഇലക്ട്രോണിക്സും | 98 |
| 4 | IEEE റോബോട്ടിക്സും ഓട്ടോമേഷൻ ലെറ്ററുകളും | 87 |
| 5 | സെൻസറുകൾ | 73 |
| 6 | ഇൻ്റർനാഷണൽ ജേണൽ ഓഫ് റിമോട്ട് സെൻസിംഗ് | 42 |
| 7 | കൃത്യമായ കൃഷി | 41 |
| 8 | ഡ്രോണുകൾ | 40 |
| 9 | കൃഷി | 34 |
| 10 | IEEE പ്രവേശനം | 34 |
| 11 | ഇൻ്റർനാഷണൽ ജേണൽ ഓഫ് അഡ്വാൻസ്ഡ് റോബോട്ടിക് സിസ്റ്റംസ് | 31 |
| 12 | ഇൻ്റർനാഷണൽ ജേണൽ ഓഫ് അഗ്രികൾച്ചറൽ ആൻഡ് ബയോളജിക്കൽ എഞ്ചിനീയറിംഗ് | 25 |
| 13 | പ്ലസ് ഒന്ന് | 25 |
| 14 | ജേണൽ ഓഫ് ഫീൽഡ് റോബോട്ടിക്സ് | 23 |
| 15 | ബയോസിസ്റ്റംസ് എഞ്ചിനീയറിംഗ് | 23 |
തീരുമാനം
ചുരുക്കം
ഈ പഠനത്തിൽ, കാർഷിക ഡ്രോണുകളെക്കുറിച്ചുള്ള നിലവിലുള്ള ഗവേഷണങ്ങൾ ഞങ്ങൾ സംഗ്രഹിക്കുകയും വിശകലനം ചെയ്യുകയും ചെയ്തു. വിവിധ ബിബ്ലിയോമെട്രിക് ടെക്നിക്കുകൾ പ്രയോഗിച്ച്, കാർഷിക ഡ്രോൺ സംബന്ധിയായ ഗവേഷണത്തിൻ്റെ ബൗദ്ധിക ഘടനയെക്കുറിച്ച് കൂടുതൽ നന്നായി മനസ്സിലാക്കാൻ ഞങ്ങൾ ശ്രമിച്ചു. ചുരുക്കത്തിൽ, ഞങ്ങളുടെ അവലോകനം സാഹിത്യത്തിലെ കീവേഡുകൾ തിരിച്ചറിയുകയും ചർച്ച ചെയ്യുകയും ചെയ്യുന്നതിലൂടെയും ഡ്രോണുകളുടെ മേഖലയിൽ അർത്ഥപരമായി സമാനമായ കമ്മ്യൂണിറ്റികൾ രൂപീകരിക്കുമ്പോൾ വിജ്ഞാന ക്ലസ്റ്ററുകൾ വെളിപ്പെടുത്തുന്നതിലൂടെയും മുമ്പത്തെ ഗവേഷണത്തിൻ്റെ രൂപരേഖ നൽകുന്നതിലൂടെയും ഭാവി ഗവേഷണ ദിശകൾ നിർദ്ദേശിക്കുന്നതിലൂടെയും നിരവധി സംഭാവനകൾ വാഗ്ദാനം ചെയ്യുന്നു. കാർഷിക ഡ്രോണുകളുടെ വികസനത്തെക്കുറിച്ചുള്ള അവലോകനത്തിൻ്റെ പ്രധാന കണ്ടെത്തലുകൾ ഞങ്ങൾ ചുവടെ നൽകുന്നു:
• 2012 ന് ശേഷമുള്ള ലേഖനങ്ങളുടെ എണ്ണത്തിൽ ഉണ്ടായ വർദ്ധനവ് സൂചിപ്പിക്കുന്നത് പോലെ, മൊത്തത്തിലുള്ള സാഹിത്യം കഴിഞ്ഞ ദശകത്തിൽ അതിവേഗം വളരുകയും വളരെയധികം ശ്രദ്ധ ആകർഷിക്കുകയും ചെയ്തു. & Steppe, 2011), നിരവധി ചോദ്യങ്ങൾക്ക് ഇപ്പോഴും ഉത്തരം ലഭിച്ചിട്ടില്ല. ഉദാഹരണത്തിന്, ഇൻഡോർ ഫാമിംഗിലെ ഡ്രോണുകളുടെ പ്രയോജനം ഇപ്പോഴും സംവാദത്തിന് തുറന്നിരിക്കുന്നു (അസ്ലാൻ et al., 2019; Krul et al., 2022; Rold'an et al., 2021). ഫീൽഡ് സീനുകളുടെ സങ്കീർണ്ണതയും വ്യത്യസ്ത ഇമേജിംഗ് സാഹചര്യങ്ങളും (ഉദാഹരണത്തിന്, ഷാഡോകളും പ്രകാശവും) ഉയർന്ന സ്പെക്ട്രൽ ഇൻ-ക്ലാസ് വ്യതിയാനത്തിന് കാരണമായേക്കാം (Yao et al., 2015). പിന്നീടുള്ള ഗവേഷണ ഘട്ടങ്ങളിൽ പോലും, പ്രത്യേക സാഹചര്യങ്ങൾക്കും ആവശ്യമായ ഇമേജ് നിലവാരത്തിനും അനുസൃതമായി ഒപ്റ്റിമൽ ഫ്ലൈറ്റ് പ്ലാനുകൾ നിർണ്ണയിക്കാൻ ഗവേഷകർ വെല്ലുവിളിക്കപ്പെട്ടു (Soares et al., 2019; Tu et al.,
2020).
• കാര്യക്ഷമമായ യുഎവി സംവിധാനങ്ങൾ വികസിപ്പിക്കുന്നതിൽ നിന്ന് മെഷീൻ ലേണിംഗ്, കാർഷിക ഡ്രോണുകളുടെ രൂപകൽപ്പനയിൽ ആഴത്തിലുള്ള പഠനം എന്നിവ പോലുള്ള AI സാങ്കേതിക വിദ്യകൾ സംയോജിപ്പിക്കുന്നതിലേക്ക് ഈ ഫീൽഡ് പുരോഗമിച്ചതായി ഞങ്ങൾ ശ്രദ്ധിക്കുന്നു (Bah et al., 2018; Kitano et al., 2019; Maimaitijiang et al. , 2020; Mazzia et al., 2020; Tetila et al., 2020).
• പരിസ്ഥിതി നിരീക്ഷണം, വിള പരിപാലനം, കള പരിപാലനം (ക്ലസ്റ്റർ 1) കൂടാതെ റിമോട്ട് ഫിനോടൈപ്പിംഗ്, വിളവ് കണക്കാക്കൽ (ക്ലസ്റ്റർ 2) എന്നിവയിലെ സാങ്കേതികവിദ്യയുടെ സാധ്യതകൾ പര്യവേക്ഷണം ചെയ്തുകൊണ്ട് കാർഷിക ഡ്രോണുകളെക്കുറിച്ചുള്ള ഗവേഷണം പ്രധാനമായും വിദൂര സംവേദനത്തെക്കുറിച്ചാണ് ചർച്ച ചെയ്യുന്നത്. കാർഷിക ഡ്രോണുകളെക്കുറിച്ചുള്ള ഒരു കൂട്ടം സ്വാധീനമുള്ള പഠനങ്ങളിൽ ഓസ്റ്റിൻ (2010), ബെർണി തുടങ്ങിയവർ ഉൾപ്പെടുന്നു. (2009)എ, ഹെർവിറ്റ്സ് et al. (2004), Nex and Remondino (2014), Zhang and Kovacs (2012). കൃഷിയുടെ പശ്ചാത്തലത്തിൽ ഡ്രോണുമായി ബന്ധപ്പെട്ട ഗവേഷണത്തിൻ്റെ ആശയപരമായ അടിത്തറ ഈ പഠനങ്ങൾ വികസിപ്പിച്ചെടുത്തു.
• രീതിശാസ്ത്രവുമായി ബന്ധപ്പെട്ട്, ഇതുവരെ നടത്തിയ ഗവേഷണങ്ങളിൽ ഭൂരിഭാഗവും സിസ്റ്റം ഡിസൈൻ, ആശയപരമായ അല്ലെങ്കിൽ അവലോകനം അടിസ്ഥാനമാക്കിയുള്ള പഠനങ്ങൾ (Inouue, 2020; Nex & Remondino, 2014; P´erez-Ortiz et al. , 2015; യാവോ et al., 2019). കാർഷിക ഡ്രോണുകൾ അന്വേഷിക്കുന്നതിൽ അനുഭവപരവും ഗുണപരവും കേസ്-പഠനത്തെ അടിസ്ഥാനമാക്കിയുള്ളതുമായ രീതികളുടെ അഭാവവും ഞങ്ങൾ ശ്രദ്ധിക്കുന്നു.
• സമീപകാലത്ത്, കൃത്യമായ കൃഷി, AI ടെക്നിക്കുകൾ, കൃത്യമായ മുന്തിരി കൃഷി, ജല സമ്മർദ്ദം വിലയിരുത്തൽ എന്നിവയുമായി ബന്ധപ്പെട്ട വിഷയങ്ങൾ ഗണ്യമായ ശ്രദ്ധ ആകർഷിച്ചു (എസ്പിനോസ et al., 2017; Gomez-Cand´ on ô et al., 2016; Matese et al., 2015; Matese & Di Gennaro, 2018, 2021; Z. Zhou et al., 2021). 1990-2010, 2011-2021 എന്നീ രണ്ട് വ്യത്യസ്ത കാലഘട്ടങ്ങളിലെ ഗവേഷണ ക്ലസ്റ്ററുകളുടെ സൂക്ഷ്മ പരിശോധന, ഡൊമെയ്നിൻ്റെ ബൗദ്ധിക ഘടനയുടെ പുരോഗതി വെളിപ്പെടുത്തുന്നു. 1990 മുതൽ 2010 വരെയുള്ള കാലഘട്ടം കേന്ദ്ര സങ്കൽപ്പങ്ങളുടെയും ഡ്രോണുകളുടെ ആശയങ്ങളുടെയും ബിൽഡ്-അപ്പ് രൂപീകരിച്ചു, ഇത് UAV രൂപകൽപ്പന, വികസനം, നടപ്പാക്കൽ എന്നിവയെക്കുറിച്ചുള്ള ചർച്ചയിൽ നിന്ന് വ്യക്തമാണ്. രണ്ടാം യുഗത്തിൽ, കാർഷിക മേഖലയിലെ യുഎവി ഉപയോഗ കേസുകൾ സമന്വയിപ്പിക്കാൻ ശ്രമിക്കുന്ന ഗവേഷണ കേന്ദ്രം മുൻകാല പഠനങ്ങളിൽ വ്യാപിക്കുന്നു. ഇമേജിംഗ് ജോലികളിലും കൃത്യമായ കൃഷിയിലും ഡ്രോൺ ആപ്ലിക്കേഷനുകൾ ചർച്ച ചെയ്യുന്ന നിരവധി പഠനങ്ങളും ഞങ്ങൾ കണ്ടെത്തി.
| റാങ്ക് | ജേർണൽ | എണ്ണുക |
| 1 | വിദൂര സംവേദനം | 258 |
| 2 | ജേണൽ ഓഫ് ഇൻ്റലിജൻ്റ് ആൻഡ് റോബോട്ടിക് സിസ്റ്റംസ്: തിയറി ആൻഡ് | 126 |
| അപ്ലിക്കേഷനുകൾ | ||
| 3 | കൃഷിയിൽ കമ്പ്യൂട്ടറുകളും ഇലക്ട്രോണിക്സും | 98 |
| 4 | IEEE റോബോട്ടിക്സും ഓട്ടോമേഷൻ ലെറ്ററുകളും | 87 |
| 5 | സെൻസറുകൾ | 73 |
| 6 | ഇൻ്റർനാഷണൽ ജേണൽ ഓഫ് റിമോട്ട് സെൻസിംഗ് | 42 |
| 7 | കൃത്യമായ കൃഷി | 41 |
| 8 | ഡ്രോണുകൾ | 40 |
| 9 | കൃഷി | 34 |
| 10 | IEEE പ്രവേശനം | 34 |
| 11 | ഇൻ്റർനാഷണൽ ജേണൽ ഓഫ് അഡ്വാൻസ്ഡ് റോബോട്ടിക് സിസ്റ്റംസ് | 31 |
| 12 | ഇൻ്റർനാഷണൽ ജേണൽ ഓഫ് അഗ്രികൾച്ചറൽ ആൻഡ് ബയോളജിക്കൽ എഞ്ചിനീയറിംഗ് | 25 |
| 13 | പ്ലസ് ഒന്ന് | 25 |
| 14 | ജേണൽ ഓഫ് ഫീൽഡ് റോബോട്ടിക്സ് | 23 |
| 15 | ബയോസിസ്റ്റംസ് എഞ്ചിനീയറിംഗ് | 22 |
വിവക്ഷകളെ
പണ്ഡിതന്മാർ, കർഷകർ, കാർഷിക വിദഗ്ധർ, വിള കൺസൾട്ടൻ്റുമാർ, UAV സിസ്റ്റം ഡിസൈനർമാർ എന്നിവരെ മനസ്സിൽ വെച്ചാണ് ഞങ്ങളുടെ ബിബ്ലിയോമെട്രിക് അവലോകനം രൂപകൽപ്പന ചെയ്യുകയും നടത്തുകയും ചെയ്തത്. രചയിതാക്കളുടെ ഏറ്റവും മികച്ച അറിവിൽ, ആഴത്തിലുള്ള ബിബ്ലിയോമെട്രിക് വിശകലനം നടത്തിയ ആദ്യത്തെ യഥാർത്ഥ അവലോകനങ്ങളിൽ ഒന്നാണിത്.
കാർഷിക മേഖലയിലെ ഡ്രോൺ ആപ്ലിക്കേഷനുകൾ. പ്രസിദ്ധീകരണങ്ങളുടെ അവലംബവും കോ-സൈറ്റേഷൻ വിശകലനവും ഉപയോഗിച്ച് ഞങ്ങൾ ഈ വിജ്ഞാന ബോഡിയുടെ സമഗ്രമായ അവലോകനം നടത്തി. ഡ്രോൺ ഗവേഷണത്തിൻ്റെ ബൗദ്ധിക ഘടന വിവരിക്കുന്നതിനുള്ള ഞങ്ങളുടെ ശ്രമങ്ങൾ അക്കാദമിക് വിദഗ്ധർക്ക് പുതിയ ഉൾക്കാഴ്ചകൾ നൽകുന്നു. കാലാകാലങ്ങളിൽ ഉപയോഗിക്കുന്ന കീവേഡുകളുടെ സൂക്ഷ്മമായ അവലോകനം, ഡ്രോണുമായി ബന്ധപ്പെട്ട സാഹിത്യത്തിലെ ഹോട്ട്സ്പോട്ടുകളും ഫോക്കൽ റിസർച്ച് ഏരിയകളും വെളിപ്പെടുത്തുന്നു. കൂടാതെ, ഈ മേഖലയിൽ പൂർത്തിയാക്കിയ ഏറ്റവും ഫലപ്രദമായ ഗവേഷണ പ്രവർത്തനങ്ങൾ തിരിച്ചറിയുന്നതിനായി ഞങ്ങൾ ഏറ്റവും ഉദ്ധരിച്ച പഠനങ്ങളുടെ ഒരു ലിസ്റ്റ് അവതരിപ്പിക്കുന്നു. ലേഖനങ്ങളുടേയും കീവേഡുകളുടേയും ഐഡൻ്റിഫിക്കേഷൻ ഭാവിയിലെ പഠനങ്ങൾക്കായുള്ള നിരവധി വഴികൾ കണ്ടെത്തുന്നതിന് തൽഫലമായി ഒരു ശക്തമായ ആരംഭ പോയിൻ്റ് നൽകും.
പ്രധാനമായി, താരതമ്യപ്പെടുത്താവുന്ന സൃഷ്ടികളെ തരംതിരിക്കുകയും ഫലങ്ങളെക്കുറിച്ച് വിശദീകരിക്കുകയും ചെയ്യുന്ന ക്ലസ്റ്ററുകൾ ഞങ്ങൾ വെളിപ്പെടുത്തി. UAV ഗവേഷണത്തിൻ്റെ ബൗദ്ധിക ഘടന മനസ്സിലാക്കാൻ ക്ലസ്റ്ററുകളിൽ തരംതിരിച്ചിരിക്കുന്ന പഠനങ്ങൾ സഹായിക്കുന്നു. ഡ്രോണുകളുടെ ദത്തെടുക്കൽ ഘടകങ്ങളെ കുറിച്ച് അന്വേഷിക്കുന്ന പഠനങ്ങളുടെ അഭാവം ഞങ്ങൾ കണ്ടെത്തി എന്നത് ശ്രദ്ധേയമാണ്
കൃഷി പ്രവർത്തനങ്ങളിലെ തടസ്സങ്ങളും (പട്ടിക 9 കാണുക). വിവിധ കാർഷിക പ്രവർത്തനങ്ങളിലും കാലാവസ്ഥാ സാഹചര്യങ്ങളിലും ഡ്രോണുകളുടെ ദത്തെടുക്കൽ ഘടകങ്ങളെ വിലയിരുത്തുന്ന അനുഭവപരമായ അന്വേഷണങ്ങൾ നടത്തി ഭാവിയിലെ ഗവേഷകർക്ക് ഈ സാധ്യതയുള്ള വിടവ് പരിഹരിക്കാനാകും. കൂടാതെ, ഡ്രോണുകളുടെ ഫലപ്രാപ്തിയെക്കുറിച്ചുള്ള കേസ് സ്റ്റഡി അടിസ്ഥാനമാക്കിയുള്ള ഗവേഷണം ഈ ഫീൽഡിൽ നിന്നുള്ള യഥാർത്ഥ ഡാറ്റ ഉപയോഗിച്ച് പിന്തുണയ്ക്കണം. കൂടാതെ, അക്കാദമിക് ഗവേഷണത്തിൽ കർഷകരെയും മാനേജർമാരെയും ഉൾപ്പെടുത്തുന്നത് ഡ്രോൺ ഗവേഷണത്തിൻ്റെ സൈദ്ധാന്തികവും പ്രായോഗികവുമായ പുരോഗതിക്ക് പ്രയോജനകരമാണ്. ഏറ്റവും പ്രമുഖരായ ഗവേഷകരെയും അവരുടെ സംഭാവനകളെയും തിരിച്ചറിയാനും ഞങ്ങൾക്ക് കഴിഞ്ഞു, കാരണം സമീപകാല സെമിനൽ വർക്കുകളെക്കുറിച്ചുള്ള അവബോധം ഭാവിയിലെ അക്കാദമിക് ഉദ്യമങ്ങൾക്ക് ചില മാർഗ്ഗനിർദ്ദേശങ്ങൾ പ്രദാനം ചെയ്യും.
പട്ടിക 9
UAV ദത്തെടുക്കൽ തടസ്സങ്ങൾ.
| തടസ്സം | വിവരണം |
| ഡാറ്റ സുരക്ഷ | നടപ്പാക്കുന്നതിന് സൈബർ സുരക്ഷ ഒരു വലിയ വെല്ലുവിളിയാണ് IoT സൊല്യൂഷനുകൾ (മസ്റൂർ et al., 2021). |
| പരസ്പര പ്രവർത്തനക്ഷമതയും സംയോജനം | UAV, WSN, IoT, തുടങ്ങിയ വിവിധ സാങ്കേതിക വിദ്യകൾ. സംയോജിപ്പിച്ച് ഡാറ്റ കൈമാറണം സങ്കീർണ്ണതയുടെ അളവ് വർദ്ധിപ്പിക്കുക (Alsamhi et al., 2021; പോപ്സ്ക്യൂ തുടങ്ങിയവർ, 2020; വുരാൻ et al., 2018). |
| നടപ്പാക്കൽ ചെലവ് | ഇത് ചെറുകിട കർഷകർക്കും പ്രത്യേകം ബാധകമാണ് വിവിധ അത്യാധുനിക സാങ്കേതികവിദ്യകൾ സമന്വയിപ്പിക്കുന്നു ( മസ്റൂർ et al., 2021). |
| തൊഴിൽ അറിവും വൈദഗ്ധ്യം | യുഎവികൾ പ്രവർത്തിപ്പിക്കുന്നതിന് വിദഗ്ധരായ ഡ്രോൺ പൈലറ്റുമാരെ ആവശ്യമുണ്ട്. കൂടാതെ, വിവിധ അത്യാധുനിക പ്രവർത്തനങ്ങൾ നടപ്പിലാക്കുന്നു സാങ്കേതികവിദ്യകൾക്ക് വിദഗ്ദ്ധരായ തൊഴിലാളികൾ ആവശ്യമാണ് (YB Huang et al., 2013; Tsouros et al., 2019). |
| എഞ്ചിൻ ശക്തിയും ഫ്ലൈറ്റും കാലാവധി | ഡ്രോണുകൾ മണിക്കൂറുകളോളം പ്രവർത്തിപ്പിക്കാൻ കഴിയില്ല വലിയ പ്രദേശങ്ങൾ (Hardin & Hardin, 2010; Laliberte et al., 2007). |
| സ്ഥിരത, വിശ്വാസ്യത, ഒപ്പം കുസൃതി | മോശം കാലാവസ്ഥയിൽ ഡ്രോണുകൾക്ക് സ്ഥിരതയില്ല (Hardin & Hardin, 2010; Laliberte et al., 2007). |
| പേലോഡ് പരിമിതികളും സെൻസറുകളുടെ ഗുണനിലവാരം | ഡ്രോണുകൾക്ക് പരിമിതമായ ലോഡുകൾ മാത്രമേ വഹിക്കാൻ കഴിയൂ കുറഞ്ഞ നിലവാരമുള്ള സെൻസറുകൾ ലോഡുചെയ്യാനുള്ള കഴിവ് (നെബിക്കർ മറ്റുള്ളവ., 2008). |
| നിയന്തിക്കല് | ഡ്രോണുകൾ അപകടകരമാകുമെന്നതിനാൽ, ഗുരുതരമായവയുണ്ട് ചില മേഖലകളിലെ നിയന്ത്രണങ്ങൾ (Hardin & Jensen, 2011; ലാലിബെർട്ടെ & രംഗോ, 2011). |
| കർഷകരുടെ അറിവും പലിശ | മറ്റ് അത്യാധുനിക സാങ്കേതികവിദ്യകൾ പോലെ, ഡ്രോണുകൾ വിജയകരമായ നടപ്പാക്കലിന് വൈദഗ്ധ്യം ആവശ്യമാണ് അനിശ്ചിതത്വങ്ങൾക്കൊപ്പം (ഫിഷർ et al., 2009; ലാംബെർട്ട് et al., 2004; സ്റ്റാഫോർഡ്, 2000). |
പരമാവധി വിളവ് ലഭിക്കുന്നതിന് ലഭ്യമായ വിഭവങ്ങൾ കാര്യക്ഷമമായി ഉപയോഗിക്കേണ്ട ആവശ്യം നിലനിൽക്കുന്നതിനാൽ, കർഷകർക്ക് തങ്ങളുടെ വയലുകളുടെ വേഗത്തിലുള്ളതും കൃത്യവും ചെലവ് കുറഞ്ഞതുമായ സ്കാനിംഗ് ഉറപ്പാക്കാൻ ഡ്രോണുകളുടെ പ്രയോജനം ലഭിക്കും. കർഷകർക്ക് അവരുടെ വിളകളുടെ അവസ്ഥ നിർണ്ണയിക്കാനും ജലത്തിൻ്റെ അവസ്ഥ, പാകമാകുന്ന ഘട്ടം, പ്രാണികളുടെ ആക്രമണം, പോഷക ആവശ്യങ്ങൾ എന്നിവ വിലയിരുത്താനും സാങ്കേതികവിദ്യയ്ക്ക് കഴിയും. ഡ്രോണുകളുടെ റിമോട്ട് സെൻസിംഗ് കഴിവുകൾക്ക് കർഷകർക്ക് പ്രശ്നങ്ങൾ പ്രാരംഭ ഘട്ടത്തിൽ മുൻകൂട്ടി കാണുന്നതിനും ഉചിതമായ ഇടപെടലുകൾ നടത്തുന്നതിനുമുള്ള നിർണായക ഡാറ്റ നൽകാൻ കഴിയും. എന്നിരുന്നാലും, വെല്ലുവിളികളെ ശരിയായി അഭിമുഖീകരിച്ചാൽ മാത്രമേ സാങ്കേതികവിദ്യയുടെ നേട്ടങ്ങൾ തിരിച്ചറിയാൻ കഴിയൂ. വെളിച്ചത്തിൽ
ഡാറ്റാ സുരക്ഷ, സെൻസർ ടെക്നോളജി പ്രശ്നങ്ങൾ (ഉദാ, അളവുകളുടെ വിശ്വാസ്യത അല്ലെങ്കിൽ കൃത്യത), സംയോജനത്തിൻ്റെ സങ്കീർണ്ണത, ഗണ്യമായ നടപ്പാക്കൽ ചെലവുകൾ എന്നിവയുമായി ബന്ധപ്പെട്ട നിലവിലെ പ്രശ്നങ്ങൾ, കാർഷിക ഡ്രോണുകളും മറ്റ് കട്ടിംഗും സംയോജിപ്പിക്കുന്നതിനുള്ള സാങ്കേതികവും സാമ്പത്തികവും പ്രവർത്തനപരവുമായ സാധ്യതകളും ഭാവി പഠനങ്ങൾ പരിശോധിക്കേണ്ടതുണ്ട്. എഡ്ജ് ടെക്നോളജികൾ.
പരിമിതികൾ
ഞങ്ങളുടെ പഠനത്തിന് നിരവധി പരിമിതികളുണ്ട്. ഒന്നാമതായി, അന്തിമ വിശകലനത്തിനായി തിരഞ്ഞെടുത്ത പ്രസിദ്ധീകരണങ്ങളാണ് കണ്ടെത്തലുകൾ നിർണ്ണയിക്കുന്നത്. കാർഷിക ഡ്രോണുകളുമായി ബന്ധപ്പെട്ട എല്ലാ പ്രസക്തമായ പഠനങ്ങളും പിടിച്ചെടുക്കുന്നത് വെല്ലുവിളിയാണ്, പ്രത്യേകിച്ച് സ്കോപ്പസ് ഡാറ്റാബേസിൽ സൂചികയിലാക്കിയിട്ടില്ലാത്തവ. കൂടാതെ, ഡാറ്റ ശേഖരണ പ്രക്രിയ തിരയൽ കീവേഡുകളുടെ സജ്ജീകരണത്തിലേക്ക് പരിമിതപ്പെടുത്തിയിരിക്കുന്നു, അത് ഉൾക്കൊള്ളാത്തതും അവ്യക്തമായ കണ്ടെത്തലുകളിലേക്ക് നയിച്ചേക്കാം. അതിനാൽ, ഭാവിയിലെ പഠനങ്ങൾ ഡാറ്റ ശേഖരണത്തിൻ്റെ അടിസ്ഥാന പ്രശ്നത്തിൽ കൂടുതൽ ശ്രദ്ധ ചെലുത്തേണ്ടതുണ്ട്
കൂടുതൽ വിശ്വസനീയമായ നിഗമനങ്ങൾ. കുറഞ്ഞ എണ്ണം ഉദ്ധരണികളുള്ള പുതിയ പ്രസിദ്ധീകരണങ്ങളെ സംബന്ധിച്ചുള്ള മറ്റൊരു പരിമിതി. ബിബ്ലിയോമെട്രിക് വിശകലനം മുമ്പത്തെ പ്രസിദ്ധീകരണങ്ങളോട് പക്ഷപാതം കാണിക്കുന്നു, കാരണം അവ വർഷങ്ങളായി കൂടുതൽ അവലംബങ്ങൾ സ്വീകരിക്കുന്നു. സമീപകാല പഠനങ്ങൾക്ക് ശ്രദ്ധ ആകർഷിക്കുന്നതിനും ഉദ്ധരണികൾ ശേഖരിക്കുന്നതിനും ഒരു നിശ്ചിത സമയം ആവശ്യമാണ്. തൽഫലമായി, ഒരു മാതൃകാ വ്യതിയാനം കൊണ്ടുവരുന്ന സമീപകാല പഠനങ്ങൾ സ്വാധീനിച്ച ആദ്യ പത്ത് കൃതികളിൽ സ്ഥാനം പിടിക്കില്ല. കാർഷിക ഡ്രോണുകൾ പോലുള്ള അതിവേഗം ഉയർന്നുവരുന്ന ഗവേഷണ മേഖലകളുടെ പരിശോധനയിൽ ഈ പരിമിതി വ്യാപകമാണ്. ഈ കൃതിയുടെ സാഹിത്യം പഠിക്കാൻ ഞങ്ങൾ സ്കോപ്പസുമായി കൂടിയാലോചിച്ചതിനാൽ, ഭാവിയിലെ ഗവേഷകർക്ക് വ്യത്യസ്തമായി പരിഗണിക്കാം
വെബ് ഓഫ് സയൻസ്, ഐഇഇഇ എക്സ്പ്ലോർ തുടങ്ങിയ ഡാറ്റാബേസുകൾ, ചക്രവാളം വികസിപ്പിക്കുന്നതിനും ഗവേഷണ ഘടന മെച്ചപ്പെടുത്തുന്നതിനും.
പുതിയ ഉൾക്കാഴ്ചകൾ സൃഷ്ടിക്കാൻ സാധ്യതയുള്ള ബിബ്ലിയോമെട്രിക് പഠനങ്ങൾ കോൺഫറൻസ് പേപ്പറുകൾ, അധ്യായങ്ങൾ, പുസ്തകങ്ങൾ എന്നിവ പോലുള്ള മറ്റ് സുപ്രധാന വിജ്ഞാന സ്രോതസ്സുകൾ പരിഗണിച്ചേക്കാം. കാർഷിക ഡ്രോണുകളെക്കുറിച്ചുള്ള ആഗോള പ്രസിദ്ധീകരണങ്ങൾ മാപ്പുചെയ്യുകയും അന്വേഷിക്കുകയും ചെയ്തിട്ടും, ഞങ്ങളുടെ കണ്ടെത്തലുകൾ സർവകലാശാലകളുടെ പണ്ഡിതോചിതമായ ഫലങ്ങൾക്ക് പിന്നിലെ കാരണങ്ങൾ വെളിപ്പെടുത്തിയില്ല. കാർഷിക ഗവേഷണത്തിൻ്റെ കാര്യത്തിൽ ചില സർവ്വകലാശാലകൾ മറ്റുള്ളവയേക്കാൾ കൂടുതൽ ഉൽപ്പാദനക്ഷമമായിരിക്കുന്നത് എന്തുകൊണ്ടാണെന്ന് ഗുണപരമായി വിശദീകരിക്കുന്ന ഒരു പുതിയ ഗവേഷണ മേഖലയിലേക്ക് ഇത് വഴിയൊരുക്കുന്നു.
ഡ്രോണുകൾ. കൂടാതെ, ഭാവിയിലെ പഠനങ്ങൾക്ക് നിരവധി ഗവേഷകർ സൂചിപ്പിച്ചതുപോലെ പരിസ്ഥിതി നിരീക്ഷണം, വിള പരിപാലനം, കള മാപ്പിംഗ് തുടങ്ങി നിരവധി മാർഗങ്ങളിലൂടെ കാർഷിക സുസ്ഥിരത വർദ്ധിപ്പിക്കുന്നതിനുള്ള ഡ്രോണുകളുടെ സാധ്യതകളെക്കുറിച്ചുള്ള ഉൾക്കാഴ്ചകൾ നൽകാൻ കഴിയും (ചമുവാ & സിംഗ്, 2019; ഇസ്ലാം et al., 2021; പോപ്പസ്ക്യൂ എറ്റ്., 2020; ജെ. സു, ലിയു, et al., 2018b). തിരഞ്ഞെടുത്ത പേപ്പറുകളുടെ എണ്ണം കൂടിയതിനാൽ വാചക വിശകലനം സാധ്യമല്ലാത്തതിനാൽ, വ്യവസ്ഥാപിത സാഹിത്യ അവലോകനങ്ങൾ ആവശ്യമാണ്.
ഉപയോഗിച്ച ഗവേഷണ രീതികളും മുൻ പഠനങ്ങളിൽ കർഷകരുടെ പങ്കാളിത്തവും. ചുരുക്കത്തിൽ, ഡ്രോൺ ഗവേഷണത്തെക്കുറിച്ചുള്ള ഞങ്ങളുടെ വിശകലനം ഈ വിജ്ഞാന ബോഡിയുടെ അദൃശ്യമായ ബന്ധങ്ങളെ തുറന്നുകാട്ടുന്നു. അതിനാൽ ഈ അവലോകനം പ്രസിദ്ധീകരണങ്ങൾ തമ്മിലുള്ള ബന്ധം കണ്ടെത്തുന്നതിനും ഗവേഷണ മേഖലയുടെ ബൗദ്ധിക ഘടനയെ പര്യവേക്ഷണം ചെയ്യുന്നതിനും സഹായിക്കുന്നു. എഴുത്തുകാരുടെ കീവേഡുകൾ, അഫിലിയേഷനുകൾ, രാജ്യങ്ങൾ എന്നിങ്ങനെയുള്ള സാഹിത്യത്തിൻ്റെ വിവിധ വശങ്ങൾ തമ്മിലുള്ള ബന്ധവും ഇത് ചിത്രീകരിക്കുന്നു.
മത്സര താൽപ്പര്യത്തിന്റെ പ്രഖ്യാപനം
ഈ പ്രബന്ധത്തിൽ റിപ്പോർട്ടുചെയ്ത ജോലിയെ സ്വാധീനിക്കുന്നതായി തോന്നിയേക്കാവുന്ന മത്സരിക്കുന്ന സാമ്പത്തിക താൽപ്പര്യങ്ങളോ വ്യക്തിഗത ബന്ധങ്ങളോ തങ്ങൾക്ക് അറിയില്ലെന്ന് രചയിതാക്കൾ പ്രഖ്യാപിക്കുന്നു.
അനുബന്ധം 1
TITLE-ABS-KEY ((ഡ്രോൺ* അല്ലെങ്കിൽ "ആളില്ലാത്ത ആകാശ വാഹനം" അല്ലെങ്കിൽ uav* അല്ലെങ്കിൽ "ആളില്ലാത്ത വിമാന സംവിധാനം”അല്ലെങ്കിൽ അമേരിക്ക അല്ലെങ്കിൽ "വിദൂരമായി പൈലറ്റ് ചെയ്ത വിമാനം”) കൂടാതെ (കാർഷിക അല്ലെങ്കിൽ കൃഷി അല്ലെങ്കിൽ കൃഷി അല്ലെങ്കിൽ കർഷകൻ))) കൂടാതെ (ഒഴിവാക്കുക (പുബിയർ, 2022)) കൂടാതെ (പരിധി വരെ (ഭാഷ, "ഇംഗ്ലീഷ്")).
അവലംബം
Aasen, H., Burkart, A., Bolten, A., Bareth, G., 2015. സസ്യ നിരീക്ഷണത്തിനായി ഭാരം കുറഞ്ഞ UAV സ്നാപ്പ്ഷോട്ട് ക്യാമറകൾ ഉപയോഗിച്ച് 3D ഹൈപ്പർസ്പെക്ട്രൽ വിവരങ്ങൾ സൃഷ്ടിക്കുന്നു: നിന്ന്
ഗുണനിലവാര ഉറപ്പിലേക്ക് ക്യാമറ കാലിബ്രേഷൻ. ISPRS J. ഫോട്ടോഗ്രാം. റിമോട്ട് സെൻസ് 108, 245–259. https://doi.org/10.1016/j.isprsjprs.2015.08.002.
Abd-Elrahman, A., Pearlstine, L., Percival, F., 2005. ആളില്ലാ ആകാശ വാഹന ചിത്രങ്ങളിൽ നിന്ന് സ്വയമേവ പക്ഷികളെ കണ്ടെത്തുന്നതിനുള്ള പാറ്റേൺ തിരിച്ചറിയൽ അൽഗൊരിതത്തിൻ്റെ വികസനം.
സർവേ. ഭൂമിയെ അറിയിക്കുക. ശാസ്ത്രം. 65 (1), 37–45.
Abdullahi, A., Rejeb, K., Rejeb, A., Mostafa, MM, Zailani, S., 2021. കൃഷിയിലെ വയർലെസ് സെൻസർ നെറ്റ്വർക്കുകൾ: ബിബ്ലിയോമെട്രിക് വിശകലനത്തിൽ നിന്നുള്ള സ്ഥിതിവിവരക്കണക്കുകൾ. സുസ്ഥിരത 13 (21),
12011.
Aboutalebi, M., Torres-Rua, AF, Kustas, WP, Nieto, H., Coopmans, C., McKee, M., ഉയർന്ന മിഴിവുള്ള ഒപ്റ്റിക്കൽ ഇമേജറിയിൽ നിഴൽ കണ്ടെത്തുന്നതിനുള്ള വ്യത്യസ്ത രീതികളുടെ വിലയിരുത്തലും കണക്കുകൂട്ടലിൽ നിഴൽ സ്വാധീനം വിലയിരുത്തലും എൻഡിവിഐ, ബാഷ്പീകരണ പ്രചോദനം. ജലസേചനം. ശാസ്ത്രം. 37 (3), 407–429. https://doi.org/10.1007/s00271-018-0613-9.
Adao, ˜ T., Hruˇska, J., Padua, ´ L., Bessa, J., Peres, E., Morais, R., Sousa, JJ, 2017. ഹൈപ്പർസ്പെക്ട്രൽ ഇമേജിംഗ്: UAV അടിസ്ഥാനമാക്കിയുള്ള സെൻസറുകളെക്കുറിച്ചുള്ള ഒരു അവലോകനം, ഡാറ്റ പ്രോസസ്സിംഗ് ഒപ്പം
കൃഷിക്കും വനവൽക്കരണത്തിനുമുള്ള അപേക്ഷകൾ. റിമോട്ട് സെൻസിംഗ് 9 (11). https://doi.org/ 10.3390/rs9111110.
Agüera Vega, F., Ramírez, FC, Saiz, MP, Rosúa, FO, 2015. ഒരു സൂര്യകാന്തി വിള നിരീക്ഷിക്കുന്നതിനായി ആളില്ലാ ആകാശ വാഹനം ഉപയോഗിച്ച് മൾട്ടി-ടെമ്പറൽ ഇമേജിംഗ്. ബയോസിസ്റ്റ്. എൻജിനീയർ.
132, 19–27. https://doi.org/10.1016/j.biosystemseng.2015.01.008.
Ajayi, OG, Salubi, AA, Angbas, AF, Odigure, MG, 2017. UAV-യിൽ നിന്നുള്ള കൃത്യമായ ഡിജിറ്റൽ എലവേഷൻ മോഡലുകളുടെ ജനറേഷൻ കുറഞ്ഞ ശതമാനം ഓവർലാപ്പിംഗ് ചിത്രങ്ങൾ സ്വന്തമാക്കി. Int.
ജെ. റിമോട്ട് സെൻസ് 38 (8–10), 3113–3134. https://doi.org/10.1080/ 01431161.2017.1285085.
Ali, I., Greifeneder, F., Stamenkovic, J., Neumann, M., Notarnicola, C., 2015. റിമോട്ട് സെൻസിംഗ് ഡാറ്റയിൽ നിന്ന് ബയോമാസ്, മണ്ണിൻ്റെ ഈർപ്പം വീണ്ടെടുക്കൽ എന്നിവയ്ക്കുള്ള മെഷീൻ ലേണിംഗ് സമീപനങ്ങളുടെ അവലോകനം. റിമോട്ട് സെൻസിംഗ് 7 (12), 16398–16421.
Alsamhi, SH, Afghah, F., Sahal, R., Hawbani, A., Al-qaness, MAA, Lee, B., Guizani, M., B5G നെറ്റ്വർക്കുകളിൽ UAV-കൾ ഉപയോഗിക്കുന്ന കാര്യങ്ങളുടെ ഗ്രീൻ ഇൻ്റർനെറ്റ്: ആപ്ലിക്കേഷനുകളുടെ ഒരു അവലോകനം
തന്ത്രങ്ങളും. പരസ്യം. ഹോക്. നെറ്റ് 117, 102505 https://doi.org/10.1016/j. adhoc.2021.102505.
Al-Thani, N., Albuainain, A., Alnaimi, F., Zorba, N., 2020. ആടുകളുടെ കന്നുകാലി നിരീക്ഷണത്തിനുള്ള ഡ്രോണുകൾ. ഇൻ: 20-ാമത് IEEE മെഡിറ്ററേനിയൻ ഇലക്ട്രോ ടെക്നിക്കൽ കോൺഫറൻസ്. https://doi.
org/10.1109/MELECON48756.2020.9140588.
Ampatzidis, Y., Partel, V., 2019. മൾട്ടിസ്പെക്ട്രൽ ഇമേജിംഗും ആർട്ടിഫിഷ്യൽ ഇൻ്റലിജൻസും ഉപയോഗിച്ച് സിട്രസിൽ UAV അടിസ്ഥാനമാക്കിയുള്ള ഉയർന്ന ത്രൂപുട്ട് ഫിനോടൈപ്പിംഗ്. റിമോട്ട് സെൻസിംഗ് 11 (4), https://doi.org/10.3390/rs11040410.
Ampatzidis, Y., Partel, V., Costa, L., 2020. Agroview: ആർട്ടിഫിഷ്യൽ ഇൻ്റലിജൻസ് ഉപയോഗിച്ച് കൃത്യമായ കാർഷിക ആപ്ലിക്കേഷനുകൾക്കായി UAV- ശേഖരിച്ച ഡാറ്റ പ്രോസസ്സ് ചെയ്യാനും വിശകലനം ചെയ്യാനും ദൃശ്യവൽക്കരിക്കാനും ക്ലൗഡ് അധിഷ്ഠിത ആപ്ലിക്കേഷൻ. കമ്പ്യൂട്ട്. ഇലക്ട്രോൺ. അഗ്രിക്. 174, 105457 https://doi. org/10.1016/j.compag.2020.105457.
Ang, K.-L.-M., Seng, JKP, 2021. കൃഷിയിലെ ഹൈപ്പർസ്പെക്ട്രൽ വിവരങ്ങളുള്ള ബിഗ് ഡാറ്റയും മെഷീൻ ലേണിംഗും. IEEE ആക്സസ് 9, 36699–36718. https://doi.org/10.1109/
ആക്സസ്.2021.3051196.
Aquilani, C., Confessore, A., Bozzi, R., Sirtori, F., Pugliese, C., 2022. അവലോകനം: മേച്ചിൽ-അധിഷ്ഠിത കന്നുകാലി സംവിധാനങ്ങളിലെ കൃത്യമായ കന്നുകാലി വളർത്തൽ സാങ്കേതികവിദ്യകൾ. അനിമൽ 16 (1), https://doi.org/10.1016/j.animal.2021.100429.
Armenta-Medina, D., Ramirez-Delreal, TA, Villanueva-Vasquez, ´ D., Mejia-Aguirre, C., നൂതന വിവരങ്ങളുടെയും ആശയവിനിമയ സാങ്കേതികവിദ്യകളുടെയും ട്രെൻഡുകൾ
കാർഷിക ഉൽപാദനക്ഷമത മെച്ചപ്പെടുത്തൽ: ഒരു ബിബ്ലിയോമെട്രിക് വിശകലനം. അഗ്രോണമി 10 (12), ആർട്ടിക്കിൾ 12. https://doi.org/10.3390/agronomy10121989.
ആംസ്ട്രോങ്, ഐ., പിറോൺ-ബ്രൂസ്സെ, എം., സ്മിത്ത്, എ., ജദുദ്, എം., 2011. ഫ്ലയിംഗ് ഗേറ്റർ: ഓക്കാം-πയിലെ ഏരിയൽ റോബോട്ടിക്സിലേക്ക്. കമ്യൂൺ പ്രോസസ് ആർക്കിടെക്റ്റ്. 2011, 329-340. https://doi. org/10.3233/978-1-60750-774-1-329.
അറോറ, SD, ചക്രവർത്തി, എ., 2021. ഉപഭോക്തൃ പരാതിയുള്ള പെരുമാറ്റത്തിൻ്റെ ബൗദ്ധിക ഘടന (CCB) ഗവേഷണം: ഒരു ബിബ്ലിയോമെട്രിക് വിശകലനം. J. ബിസിനസ് റെസ്. 122, 60-74.
അസ്ലാൻ, എംഎഫ്, ദുർഡു, എ., സബാൻസി, കെ., റോപെലെവ്സ്ക, ഇ., ഗുൽറ്റെകിൻ, എസ്എസ്, 2022.
തുറസ്സായ വയലുകളിലും ഹരിതഗൃഹങ്ങളിലും കൃത്യമായ കൃഷിക്കായി UAV-യുമായുള്ള സമീപകാല പഠനങ്ങളുടെ സമഗ്രമായ സർവേ. ആപ്പ്. ശാസ്ത്രം. 12 (3), 1047. https://doi.org/10.3390/
ആപ്പ്12031047.
Atkinson, JA, Jackson, RJ, Bentley, AR, Ober, E., & Wells, DM (2018). ഫീൽഡ് ഫിനോടൈപ്പിംഗ് ഫോർ ദ ഫ്യൂച്ചർ. വാർഷിക സസ്യ അവലോകനങ്ങൾ ഓൺലൈനിൽ (പേജ്. 719–736). ജോൺ
Wiley & Sons, Ltd. doi: 10.1002/9781119312994.apr0651.
ഓസ്റ്റിൻ, ആർ., 2010. ആളില്ലാ വിമാന സംവിധാനങ്ങൾ: UAVS ഡിസൈൻ, വികസനം, വിന്യാസം. ഇതിൽ: ആളില്ലാ വിമാന സംവിധാനങ്ങൾ: UAVS ഡിസൈൻ, വികസനം കൂടാതെ
വിന്യാസം. ജോൺ വില്ലിയും മക്കളും. https://doi.org/10.1002/9780470664797.
അവായിസ്, എം., ലി, ഡബ്ല്യു., ചീമ, എം.ജെ.എം, സമാൻ, ക്യു, ഷഹീൻ, എ., അസ്ലം, ബി., ഷു, ഡബ്ല്യു., അജ്മൽ, എം., ഫഹീം, എം., ഹുസൈൻ, എസ്., നദീം, AA, Afzal, MM, Liu, C., 2022. സസ്യ സമ്മർദ്ദത്തിൽ UAV അടിസ്ഥാനമാക്കിയുള്ള റിമോട്ട് സെൻസിംഗ് ഡിജിറ്റൽ കാർഷിക രീതികൾക്കായി ഉയർന്ന റെസല്യൂഷൻ തെർമൽ സെൻസർ ഉപയോഗിച്ച് സങ്കൽപ്പിക്കുക: ഒരു മെറ്റാ റിവ്യൂ. Int. ജെ. പരിസ്ഥിതി. ശാസ്ത്രം. ടെക്നോൾ. https://doi.
org/10.1007/s13762-021-03801-5.
ബാക്കോ, എം., ബെർട്ടൺ, എ., ഫെറോ, ഇ., ജെന്നാരോ, സി., ഗോട്ട, എ., മാറ്റൊലി, എസ്., പവോനെസ്സ, എഫ്., റുഗ്ഗേരി, എം., വിറോൺ, ജി., സനെല്ല, എ., 2018. സ്മാർട്ട് ഫാമിംഗ്: അവസരങ്ങൾ, വെല്ലുവിളികൾ
സാങ്കേതികവിദ്യ പ്രാപ്തമാക്കുന്നവയും. 2018 IoT ലംബവും. ടോപ്പിക്കൽ സമ്മിറ്റ് ഓൺ അഗ്രികൾച്ചർ -ടസ്കാനി (ഐഒടി ടസ്കാനി) 1–6. https://doi.org/10.1109/IOTTUSCANY.2018.8373043.
Bah, MD, Hafiane, A., Canals, R., 2018. UAV ചിത്രങ്ങളിലെ ലൈൻ ക്രോപ്പുകളിലെ കളകൾ കണ്ടെത്തുന്നതിനുള്ള മേൽനോട്ടമില്ലാത്ത ഡാറ്റ ലേബലിംഗിനൊപ്പം ആഴത്തിലുള്ള പഠനം. റിമോട്ട് സെൻസിംഗ് 10 (11), 1690.
https://doi.org/10.3390/rs10111690.
ബാൽഡി, എസ്., 1998. ഉദ്ധരണികളുടെ അലോക്കേഷനിലെ നോർമേറ്റീവ് വേഴ്സസ് സോഷ്യൽ കൺസ്ട്രക്റ്റിവിസ്റ്റ് പ്രക്രിയകൾ: ഒരു നെറ്റ്വർക്ക്-അനലിറ്റിക് മോഡൽ. ആം. സോഷ്യൽ. റവ. 63 (6), 829–846. https://doi.
org/10.2307/2657504.
Baluja, J., Diago, MP, Balda, P., Zorer, R., Meggio, F., Morales, F., Tardaguila, J., 2012. തെർമൽ, മൾട്ടിസ്പെക്ട്രൽ എന്നിവ പ്രകാരം മുന്തിരിത്തോട്ടത്തിലെ ജലത്തിൻ്റെ നില വ്യതിയാനത്തിൻ്റെ വിലയിരുത്തൽ
ആളില്ലാ ആകാശ വാഹനം (UAV) ഉപയോഗിച്ചുള്ള ചിത്രങ്ങൾ. ജലസേചനം. ശാസ്ത്രം. 30 (6), 511–522. https://doi.org/10.1007/s00271-012-0382-9.
ബരാബാസ്ചി, ഡി., ടോണ്ടെല്ലി, എ., ഡെസിഡേരിയോ, എഫ്., വോളാൻ്റേ, എ., വാക്സിനോ, പി., വാൽ, ജി., കാട്ടിവെല്ലി, എൽ., അടുത്ത തലമുറയുടെ പ്രജനനം. പ്ലാൻ്റ് സയൻസ്. 242, 3-13. https://doi.org/10.1016/j.
plantci.2015.07.010.
Barbedo, JGA, Koenigkan, LV, 2018. കന്നുകാലികളെ നിരീക്ഷിക്കാൻ ആളില്ലാ ആകാശ സംവിധാനങ്ങളുടെ ഉപയോഗത്തെക്കുറിച്ചുള്ള കാഴ്ചപ്പാടുകൾ. ഔട്ട്ലുക്ക് അഗ്രിക്. 47 (3), 214–222. https://doi.org/10.1177/0030727018781876.
ബാരെത്ത്, ജി., ആസെൻ, എച്ച്., ബെൻഡിഗ്, ജെ., ഗ്നൈപ്, എം.എൽ, ബോൾട്ടൻ, എ., ജംഗ്, എ., മിഷേൽസ്, ആർ., സൗക്കമാകി, ¨ ജെ., 2015. ലോ-വെയ്റ്റ്, യുഎവി അടിസ്ഥാനമാക്കിയുള്ള ഹൈപ്പർസ്പെക്ട്രൽ പൂർണ്ണ ഫ്രെയിം ക്യാമറകൾ
വിളകൾ നിരീക്ഷിക്കുന്നതിന്: പോർട്ടബിൾ സ്പെക്ട്രോറേഡിയോമീറ്റർ അളവുകളുമായുള്ള സ്പെക്ട്രൽ താരതമ്യം. ഫോട്ടോഗ്രാംമെട്രി, ഫെർണർകുണ്ടുങ്, ജിയോ ഇൻഫർമേഷൻ 2015 (1), 69–79.
https://doi.org/10.1127/pfg/2015/0256.
ബാരിയൻ്റസ്, എ., കൊളറാഡോ, ജെ., ഡെൽ സെറോ, ജെ., മാർട്ടിനെസ്, എ., റോസി, സി., സാൻസ്, ഡി., വാലൻ്റേ, ജെ., ഏരിയൽ റിമോട്ട് സെൻസിംഗ് ഇൻ അഗ്രികൾച്ചർ: ഏരിയ കവറേജിലേക്കുള്ള ഒരു പ്രായോഗിക സമീപനം
കൂടാതെ മിനി ഏരിയൽ റോബോട്ടുകളുടെ കപ്പലുകളുടെ പാത്ത് പ്ലാനിംഗ്. ജെ. ഫീൽഡ് റോബ്. 28 (5), 667–689. https://doi.org/10.1002/rob.20403.
Basiri, A., Mariani, V., Silano, G., Aatif, M., Iannelli, L., Glielmo, L., 2022. മൾട്ടി-റോട്ടർ UAV-കൾക്കുള്ള പാത്ത് പ്ലാനിംഗ് അൽഗോരിതങ്ങൾ കൃത്യമായി പ്രയോഗിക്കുന്നതിനെക്കുറിച്ചുള്ള ഒരു സർവേ
കൃഷി. ജെ. നാവിഗ്. 75 (2), 364–383.
Basnet, B., Bang, J., 2018. അത്യാധുനിക വിജ്ഞാന-ഇൻ്റൻസീവ് കൃഷി: അപ്ലൈഡ് സെൻസിംഗ് സിസ്റ്റങ്ങളെയും ഡാറ്റ അനലിറ്റിക്സിനെയും കുറിച്ചുള്ള ഒരു അവലോകനം. ജെ സെൻസ് 2018, 1–13.
Bendig, J., Bolten, A., Bareth, G., 2013. വിള വളർച്ചാ വ്യതിയാനം നിരീക്ഷിക്കുന്നതിന് മൾട്ടി-ടെമ്പറൽ, വളരെ ഉയർന്ന റെസല്യൂഷൻ ക്രോപ്പ് ഉപരിതല മോഡലുകൾക്കായുള്ള UAV-അധിഷ്ഠിത ഇമേജിംഗ്. ഫോട്ടോഗ്രാംമെട്രി, ഫെർണർകുണ്ടുങ്, ജിയോ ഇൻഫർമേഷൻ 2013 (6), 551–562. https://doi. org/10.1127/1432-8364/2013/0200.
Bendig, J., Bolten, A., Bennertz, S., Broscheit, J., Eichfuss, S., Bareth, G., 2014. UAV അടിസ്ഥാനമാക്കിയുള്ള RGB ഇമേജിംഗിൽ നിന്ന് ഉരുത്തിരിഞ്ഞ ക്രോപ്പ് പ്രതല മോഡലുകൾ (CSMs) ഉപയോഗിച്ച് ബാർലിയുടെ ജൈവാംശം കണക്കാക്കുന്നു. റിമോട്ട് സെൻസിംഗ് 6 (11), 10395–10412.
Bendig, J., Yu, K., Aasen, H., Bolten, A., Bennertz, S., Broscheit, J., Gnyp, ML, Bareth, G., 2015. ക്രോപ്പ് ഉപരിതലത്തിൽ നിന്ന് UAV അടിസ്ഥാനമാക്കിയുള്ള ചെടികളുടെ ഉയരം കൂട്ടിച്ചേർക്കുന്നു മോഡലുകൾ,
ബാർലിയിലെ ബയോമാസ് നിരീക്ഷണത്തിനായി ദൃശ്യമായതും സമീപമുള്ള ഇൻഫ്രാറെഡ് സസ്യ സൂചികകളും. Int. ജെ. ആപ്പ്. എർത്ത് ഒബ്സ്. ജിയോഇൻഫ്. 39, 79-87. https://doi.org/10.1016/j.jag.2015.02.012.
ബെർണി, ജെഎ, സർകോ-തേജഡ, പിജെ, സെപൽക്രെ-കാൻ്റോ, ´ ജി., ഫെററസ്, ഇ., വില്ലലോബോസ്, എഫ്., 2009 എ. ഉയർന്ന റെസല്യൂഷൻ ഉപയോഗിച്ച് ഒലിവ് തോട്ടങ്ങളിലെ മേലാപ്പ് ചാലകതയും CWSI മാപ്പിംഗ്
തെർമൽ റിമോട്ട് സെൻസിംഗ് ഇമേജറി. റിമോട്ട് സെൻസ് പരിസ്ഥിതി. 113 (11), 2380–2388. https://doi.org/10.1016/j.rse.2009.06.018.
ബെർണി, ജെഎ, സർകോ-തേജഡ, പിജെ, സുവാരസ്, എൽ., ഫെറസ്, ഇ., 2009 ബി. ആളില്ലാ ആകാശ വാഹനത്തിൽ നിന്ന് സസ്യങ്ങൾ നിരീക്ഷിക്കുന്നതിനുള്ള തെർമൽ, നാരോബാൻഡ് മൾട്ടിസ്പെക്ട്രൽ റിമോട്ട് സെൻസിംഗ്. IEEE ട്രാൻസ്. ജിയോസ്കി. റിമോട്ട് സെൻസ് 47 (3), 722–738.
Bouzembrak, Y., Kluche, M., Gavai, A., Marvin, HJP, 2019. ഇൻ്റർനെറ്റ് ഓഫ് തിംഗ്സ് ഇൻ ഫുഡ് സേഫ്റ്റി: സാഹിത്യ അവലോകനവും ഒരു ബിബ്ലിയോമെട്രിക് വിശകലനവും. ട്രെൻഡ്സ് ഫുഡ് സയൻസ്. ടെക്നോൾ. 94,54-64. https://doi.org/10.1016/j.tifs.2019.11.002.
Brewster, C., Roussaki, I., Kalatzis, N., Doolin, K., Ellis, K., 2017. IoT in Agriculture: ഒരു യൂറോപ്പ് വ്യാപകമായ വലിയ തോതിലുള്ള പൈലറ്റ് രൂപകൽപ്പന ചെയ്യുന്നു. IEEE കമ്മ്യൂൺ. മാഗ്. 55 (9), 26–33.
Buters, TM, Belton, D., Cross, AT, 2019. മില്ലിമീറ്റർ കൃത്യതയിൽ വ്യക്തിഗത തൈകളുടെയും തൈ കമ്മ്യൂണിറ്റികളുടെയും മൾട്ടി-സെൻസർ UAV ട്രാക്കിംഗ്. ഡ്രോണുകൾ 3 (4), 81.
https://doi.org/10.3390/drones3040081.
Candiago, S., Remondino, F., De Giglio, M., Dubbini, M., Gattelli, M., 2015. UAV ചിത്രങ്ങളിൽ നിന്ന് കൃത്യമായ കൃഷി ആപ്ലിക്കേഷനുകൾക്കായി മൾട്ടിസ്പെക്ട്രൽ ചിത്രങ്ങളും സസ്യ സൂചികകളും വിലയിരുത്തുന്നു. റിമോട്ട് സെൻസിംഗ് 7 (4), 4026–4047. https://doi.org/10.3390/rs70404026.
Cao, Y., Li, GL, Luo, YK, Pan, Q., Zhang, SY, 2020. UAV-യിൽ നിന്ന് ഉരുത്തിരിഞ്ഞ വൈഡ്-ഡൈനാമിക്-റേഞ്ച് വെജിറ്റേഷൻ ഇൻഡക്സ് (WDRVI) ഉപയോഗിച്ച് പഞ്ചസാര ബീറ്റ്റൂട്ട് വളർച്ചാ സൂചകങ്ങളുടെ നിരീക്ഷണം
മൾട്ടിസ്പെക്ട്രൽ ചിത്രങ്ങൾ. കമ്പ്യൂട്ട്. ഇലക്ട്രോൺ. അഗ്രിക്. 171, 105331 https://doi.org/10.1016/j.compag.2020.105331.
കാസില്ലാസ്, ജെ., അസിഡോ, എഫ്., 2007. കുടുംബ ബിസിനസ് സാഹിത്യത്തിൻ്റെ ബൗദ്ധിക ഘടനയുടെ പരിണാമം: FBR-നെക്കുറിച്ചുള്ള ഒരു ബിബ്ലിയോമെട്രിക് പഠനം. ഫാമിലി ബിസിനസ് റവ. 20 (2), 141–162.
സെൻ, എച്ച്., വാൻ, എൽ., ഷു, ജെ., ലി, വൈ., ലി, എക്സ്., ഷു, വൈ., വെങ്, എച്ച്., വു, ഡബ്ല്യു., യിൻ, ഡബ്ല്യു., സൂ, സി., Bao, Y., Feng, L., Shou, J., He, Y., 2019. അരിയുടെ ജൈവവസ്തുവിൻ്റെ ചലനാത്മക നിരീക്ഷണം
ഡ്യുവൽ ഇമേജ്-ഫ്രെയിം സ്നാപ്പ്ഷോട്ട് ക്യാമറകളുള്ള കനംകുറഞ്ഞ UAV ഉപയോഗിച്ച് വ്യത്യസ്ത നൈട്രജൻ ചികിത്സകൾ. പ്ലാൻ്റ് രീതികൾ 15 (1), 32. https://doi.org/10.1186/s13007-019-
0418-8.
Chamuah, A., Singh, R., 2019. സിവിലിയൻ UAV വഴി ഇന്ത്യൻ കൃഷിയിൽ സുസ്ഥിരത ഉറപ്പാക്കൽ: ഒരു ഉത്തരവാദിത്ത നവീകരണ വീക്ഷണം. എസ്എൻ ആപ്പ്. ശാസ്ത്രം. 2 (1), 106. https://
doi.org/10.1007/s42452-019-1901-6.
Chamuah, A., Singh, R., 2022. ഇന്ത്യൻ വിള ഇൻഷുറൻസ് അപേക്ഷകൾക്കായുള്ള സിവിലിയൻ ആളില്ലാ വിമാന (UAV) കണ്ടുപിടുത്തങ്ങളുടെ ഉത്തരവാദിത്ത ഭരണം. ജെ. ഉത്തരവാദി
ടെക്നോൾ. 9, 100025 https://doi.org/10.1016/j.jrt.2022.100025.
Chen, A., Orlov-Levin, V., Meron, M., 2019. കൃത്യമായ ജലസേചന മാനേജ്മെൻ്റിന് വിള മേലാപ്പിൻ്റെ ഉയർന്ന മിഴിവുള്ള ദൃശ്യ-ചാനൽ ഏരിയൽ ഇമേജിംഗ് പ്രയോഗിക്കുന്നു. അഗ്രിക്. വെള്ളം
മാനഗ്. 216, 196-205. https://doi.org/10.1016/j.agwat.2019.02.017.
Daakir, M., Pierrot-Deseilligny, M., Bosser, P., Pichard, F., Thom, C., Rabot, Y., Martin, O., 2017. ഓൺ-ബോർഡ് ഫോട്ടോഗ്രാമെട്രിയും സിംഗിൾ ഫ്രീക്വൻസി GPS പൊസിഷനിംഗും ഉള്ള ഭാരം കുറഞ്ഞ UAV മെട്രോളജി ആപ്ലിക്കേഷനുകൾക്കായി. ISPRS J. ഫോട്ടോഗ്രാം. റിമോട്ട് സെൻസ് 127, 115–126. https://doi.org/10.1016/j.isprsjprs.2016.12.007.
Dawaliby, S., Aberkane, A., Bradai, A., 2020. സ്വയംഭരണാധികാരമുള്ള ഡ്രോൺ ഓപ്പറേഷൻസ് മാനേജ്മെൻ്റിനുള്ള ബ്ലോക്ക്ചെയിൻ അടിസ്ഥാനമാക്കിയുള്ള IoT പ്ലാറ്റ്ഫോം. ഇതിൽ: 2nd ACM-ൻ്റെ നടപടിക്രമങ്ങൾ
5G, അതിനപ്പുറമുള്ള ഡ്രോൺ അസിസ്റ്റഡ് വയർലെസ് കമ്മ്യൂണിക്കേഷനുകളെക്കുറിച്ചുള്ള MobiCom വർക്ക്ഷോപ്പ്, പേജ് 31–36. https://doi.org/10.1145/3414045.3415939.
ഡേ, ആർഎ, ഗാസ്റ്റൽ, ബി., 1998. എങ്ങനെ ഒരു ശാസ്ത്ര പ്രബന്ധം എഴുതുകയും പ്രസിദ്ധീകരിക്കുകയും ചെയ്യാം. കേംബ്രിഡ്ജ് യൂണിവേഴ്സിറ്റി പ്രസ്സ്. de Castro, AI, Pena, ˜ JM, Torres-Sanchez, ´ J., Jim´enez-Brenes, FM, ValenciaGredilla, F., Recasens, J., Lopez-Granados, ´ F., 2020. മാപ്പിംഗ് സൈനോഡൺ 12 inf dactylon ഒരു ഓട്ടോമാറ്റിക് ഡിസിഷൻ ട്രീ-ഒബിഐഎ നടപടിക്രമവും കൃത്യമായ മുന്തിരി കൃഷിക്കായി യുഎവി ഇമേജറിയും ഉപയോഗിച്ച് വിളകൾ മൂടുക. റിമോട്ട് സെൻസിംഗ് 1 (56), 10.3390. https://doi.org/12010056/rsXNUMX.
de Castro, AI, Torres-S´ anchez, J., Pena, ˜ JM, Jim´enez-Brenes, FM, Csillik, O., Lopez- ´Granados, F., 2018. ഒരു ഓട്ടോമാറ്റിക് റാൻഡം ഫോറസ്റ്റ്-OBIA അൽഗോരിതം UAV ഇമേജറി ഉപയോഗിച്ച് ക്രോപ്പ് വരികൾക്കിടയിലും ഉള്ളിലും ആദ്യകാല കള മാപ്പിംഗ്. റിമോട്ട് സെൻസിംഗ് 10 (2). https://doi.org/10.3390/rs10020285.
Demir, N., Sonmez, ¨ NK, Akar, T., Ünal, S., 2018. UAV ഇമേജറിയിൽ നിന്ന് ഉരുത്തിരിഞ്ഞ ഒരു DSM ഉപയോഗിച്ച് ഗോതമ്പ് ജനിതകമാതൃകകളുടെ ചെടികളുടെ ഉയരം സ്വയമേവ അളക്കൽ. നടപടിക്രമങ്ങൾ 2 (7), 350. https://doi.org/10.3390/ecrs-2-05163.
Deng, J., Zhong, Z., Huang, H., Lan, Y., Han, Y., Zhang, Y., 2020. ആളില്ലാ ആകാശ വാഹനങ്ങൾ ഉപയോഗിച്ച് തത്സമയ കള മാപ്പിംഗിനുള്ള ലൈറ്റ് വെയ്റ്റ് സെമാൻ്റിക് സെഗ്മെൻ്റേഷൻ നെറ്റ്വർക്ക്. ആപ്പ്. ശാസ്ത്രം. 10 (20), 7132. https://doi.org/10.3390/app10207132.
Deng, L., Mao, Z., Li, X., Hu, Z., Duan, F., Yan, Y., 2018. UAV അടിസ്ഥാനമാക്കിയുള്ള മൾട്ടിസ്പെക്ട്രൽ റിമോട്ട് സെൻസിംഗ് കൃത്യമായ കൃഷി: വ്യത്യസ്ത ക്യാമറകൾ തമ്മിലുള്ള താരതമ്യം. ISPRS J. ഫോട്ടോഗ്രാം. റിമോട്ട് സെൻസ് 146, 124–136.
Diaz-Gonzalez, FA, Vuelvas, J., Correa, CA, Vallejo, VE, Patino, D., 2022. മണ്ണിൻ്റെ സൂചകങ്ങൾ കണക്കാക്കാൻ പ്രയോഗിക്കുന്ന മെഷീൻ ലേണിംഗും റിമോട്ട് സെൻസിംഗ് ടെക്നിക്കുകളും - അവലോകനം. ഇക്കോൾ. ഇൻഡ്. 135, 108517 https://doi.org/10.1016/j.ecolind.2021.108517.
Díaz-Varela, RA, De la Rosa, R., Leon, ´ L., Zarco-Tejada, PJ, 2015. 3D ഫോട്ടോ ഉപയോഗിച്ച് ഒലിവ് ട്രീ ക്രൗൺ പാരാമീറ്ററുകൾ വിലയിരുത്തുന്നതിന് ഉയർന്ന റെസല്യൂഷൻ എയർബോൺ UAV ഇമേജറി
പുനർനിർമ്മാണം: ബ്രീഡിംഗ് ട്രയലുകളിലെ പ്രയോഗം. റിമോട്ട് സെൻസിംഗ് 7 (4), 4213–4232. https://doi.org/10.3390/rs70404213.
ദീക്ഷിത്, എ., ജാഖർ, എസ്കെ, 2021. എയർപോർട്ട് കപ്പാസിറ്റി മാനേജ്മെൻ്റ്: ഒരു അവലോകനവും ബിബ്ലിയോമെട്രിക് വിശകലനവും. ജെ. എയർ ട്രാൻസ്പ്. മാനഗ്. 91, 102010.
ഡോങ്, ടി., ഷാങ്, ജെ., ലിയു, ജെ., ക്വിയാൻ, ബി., ജിംഗ്, ക്യു., മാ, ബി., ഹഫ്മാൻ, ടി., ഗെങ്, എക്സ്., സോ, എ., ഷി, വൈ., Canisius, F., Jiao, X., Kovacs, JM, Walters, D., Cable, J., Wilson, J., 2019.
കാനഡയിലെ ഒൻ്റാറിയോയിലെ വിള വളർച്ചയുടെയും വിളവിൻ്റെയും വയലിനുള്ളിലെ വ്യതിയാനം തിരിച്ചറിയാൻ RapidEye ഇമേജറി ഉപയോഗിക്കുന്നു. പ്രിസിഷൻ അഗ്രിക്. 20 (6), 1231–1250. https://doi.org/10.1007/
s11119-019-09646-w.
ദത്ത, പികെ, മിത്ര, എസ്., 2021. കൊവിഡ്-19 ന് ശേഷമുള്ള സമയത്ത് ഭക്ഷ്യ വിതരണ ശൃംഖല മനസ്സിലാക്കാൻ കാർഷിക ഡ്രോണുകളുടെയും ഐഒടിയുടെയും പ്രയോഗം. ഇൻ: ചൗധരി, എ., ബിശ്വാസ്, എ., പ്രതീക്, എം.,
ചക്രബർത്തി, എ. (എഡ്സ്.), അഗ്രികൾച്ചറൽ ഇൻഫോർമാറ്റിക്സ്: ഐഒടിയും മെഷീൻ ലേണിംഗും ഉപയോഗിക്കുന്ന ഓട്ടോമേഷൻ. വൈലി, പേജ്. 67–87. van Eck, N., Waltman, L., 2009. സോഫ്റ്റ്വെയർ സർവേ: VOSviewer, ബിബ്ലിയോമെട്രിക് മാപ്പിംഗിനുള്ള കമ്പ്യൂട്ടർ പ്രോഗ്രാം. സയൻറോമെട്രിക്സ് 84 (2), 523–538. https://doi.org/10.1007/s11192-009-0146-3.
Elijah, O., Rahman, TA, Orikumhi, I., Leow, CY, Hindi, MN, 2018. ഇൻ്റർനെറ്റ് ഓഫ് തിംഗ്സിൻ്റെ (IoT) ഒരു അവലോകനവും കാർഷിക മേഖലയിലെ ഡാറ്റാ അനലിറ്റിക്സും: നേട്ടങ്ങളും വെല്ലുവിളികളും.
IEEE ഇൻ്റർനെറ്റ് കാര്യങ്ങൾ J. 5 (5), 3758–3773.
Enciso, J., Avila, CA, Jung, J., Elsayed-Frag, S., Chang, A., Yeom, J., Landivar, J., Maeda, M., Chavez, JC, 2019. അഗ്രോണമിക് മൂല്യനിർണ്ണയം യുഎവിയും ഫീൽഡും
തക്കാളി ഇനങ്ങൾക്കുള്ള അളവുകൾ. കമ്പ്യൂട്ട്. ഇലക്ട്രോൺ. അഗ്രിക്. 158, 278-283. https:// doi.org/10.1016/j.compag.2019.02.011.
Espinoza, CZ, Khot, LR, Sankaran, S., Jacoby, PW, 2017. ഉയർന്ന റെസല്യൂഷൻ മൾട്ടിസ്പെക്ട്രൽ, തെർമൽ റിമോട്ട് സെൻസിംഗ് അടിസ്ഥാനമാക്കിയുള്ള ജല സമ്മർദ്ദം വിലയിരുത്തൽ
ഭൂഗർഭ ജലസേചന മുന്തിരിവള്ളികൾ. റിമോട്ട് സെൻസിംഗ് 9 (9), 961. https://doi.org/ 10.3390/rs9090961.
Ewing, J., Oommen, T., Jayakumar, P., Alger, R., 2020. മണ്ണിൻ്റെ ഗ്രേഡേഷനായി ഹൈപ്പർസ്പെക്ട്രൽ റിമോട്ട് സെൻസിംഗ് ഉപയോഗിക്കുന്നു. റിമോട്ട് സെൻസിംഗ് 12 (20), 3312. ttps://doi.org/10.3390/
rs12203312.
ഫോസെറ്റ്, ഡി., പാനിഗഡ, സി., ടാഗ്ലിയബ്യൂ, ജി., ബോഷെറ്റി, എം., സെലെസ്റ്റി, എം., എവ്ഡോകിമോവ്, എ., ബിരിയുകോവ, കെ., കൊളംബോ, ആർ., മിഗ്ലിയേറ്റ, എഫ്., റാഷർ, യു., ആൻഡേഴ്സൺ, കെ., 2020. ഡ്രോൺ അടിസ്ഥാനമാക്കിയുള്ള മൾട്ടിസ്പെക്ട്രൽ ഉപരിതല പ്രതിഫലനത്തിൻ്റെയും പ്രവർത്തന സാഹചര്യങ്ങളിലെ സസ്യ സൂചികകളുടെയും മൾട്ടിസ്കെയിൽ വിലയിരുത്തൽ. റിമോട്ട് സെൻസിംഗ് 12 (3), 514.
Feng, X., Yan, F., Liu, X., 2019. കൃത്യമായ കൃഷിക്കായി ഇൻ്റർനെറ്റ് ഓഫ് തിംഗ്സിലെ വയർലെസ് കമ്മ്യൂണിക്കേഷൻ സാങ്കേതികവിദ്യകളുടെ പഠനം. വയർലെസ് പേഴ്സ്. കമ്യൂൺ 108 (3),
XXX - 1785.
Ferreira, MP, Pinto, CF, Serra, FR, 2014. ഇൻ്റർനാഷണൽ ബിസിനസ് റിസർച്ചിലെ ഇടപാട് ചിലവ് സിദ്ധാന്തം: മൂന്ന് പതിറ്റാണ്ടുകളായി ഒരു ബിബ്ലിയോമെട്രിക് പഠനം. സയൻറോമെട്രിക്സ് 98 (3), 1899–1922. https://doi.org/10.1007/s11192-013-1172-8.
ഫിഷർ, പി., അബുസർ, എം., റാബ്, എം., ബെസ്റ്റ്, എഫ്., ചന്ദ്ര, എസ്., 2009. തെക്ക്-കിഴക്കൻ ഓസ്ട്രേലിയയിലെ കൃത്യമായ കൃഷിയിൽ പുരോഗതി. I. അനുകരിക്കാനുള്ള ഒരു റിഗ്രഷൻ രീതിശാസ്ത്രം
കർഷകരുടെ ചരിത്രപരമായ പാടശേഖരങ്ങളിലെ വിളവ്, നോർമലൈസ്ഡ് വെജിറ്റേഷൻ ഇൻഡക്സ് എന്നിവ ഉപയോഗിച്ച് ധാന്യവിളകളിലെ സ്ഥലപരമായ വ്യതിയാനം. വിള മേച്ചിൽ ശാസ്ത്രം. 60 (9), 844–858.
Floreano, D., Wood, RJ, 2015. ചെറിയ സ്വയംഭരണ ഡ്രോണുകളുടെ ശാസ്ത്രവും സാങ്കേതികവിദ്യയും ഭാവിയും. നേച്ചർ 521 (7553), 460–466. https://doi.org/10.1038/nature14542.
Friha, O., Ferrag, MA, Shu, L., Maglaras, LA, Wang, X., 2021. സ്മാർട്ട് കൃഷിയുടെ ഭാവിക്കായുള്ള ഇൻ്റർനെറ്റ് ഓഫ് തിംഗ്സ്: വളർന്നുവരുന്ന സാങ്കേതികവിദ്യകളുടെ ഒരു സമഗ്ര സർവേ. IEEE CAA J. ഓട്ടോം. സിനിക്ക 8 (4), 718–752.
Fuentes-Pacheco, J., Torres-Olivares, J., Roman-Rangel, E., Cervantes, S., JuarezLopez, P., Hermosillo-Valadez, J., Rendon-Mancha, ´ JM, 2019. ഫിഗ് പ്ലാൻ്റ് സെഗ്മെൻ്റേഷൻ ആഴത്തിലുള്ള കൺവല്യൂഷണൽ എൻകോഡർ-ഡീകോഡർ നെറ്റ്വർക്ക് ഉപയോഗിച്ച് ഏരിയൽ ഇമേജുകളിൽ നിന്ന്. റിമോട്ട് സെൻസിംഗ് 11 (10), 1157. https://doi.org/10.3390/rs11101157.
ഗാഗോ, ജെ., ഡൗത്ത്, സി., കൂപ്മാൻ, ആർഇ, ഗാലെഗോ, പിപി, റിബാസ്-കാർബോ, എം., ഫ്ലെക്സാസ്, ജെ., എസ്കലോണ, ജെ., മെഡ്രാനോ, എച്ച്., 2015. ജലത്തിൻ്റെ സമ്മർദ്ദം വിലയിരുത്താൻ യുഎവികൾ വെല്ലുവിളിക്കുന്നു
സുസ്ഥിര കൃഷി. അഗ്രിക്. വാട്ടർ മാനഗ്. 153, 9–19. https://doi.org/10.1016/j. agwat.2015.01.020.
García-Tejero, IF, Rubio, AE, Vinuela, ˜ I., Hern´ Andez, A., Gutierrez-Gordillo, S., Rodríguez-Pleguezuelo, CR, Dur' an-Zuazo, VH, 2018. തെർമൽ ഇമേജിംഗ് പ്ലാൻ്റിൽ
കമ്മി ജലസേചന തന്ത്രങ്ങൾക്ക് കീഴിലുള്ള ബദാം മരങ്ങളിലെ (cv. Guara) വിള-ജല നില വിലയിരുത്തുന്നതിനുള്ള നില. അഗ്രിക്. വാട്ടർ മാനഗ്. 208, 176-186. https://doi.org/10.1016/j.
agwat.2018.06.002.
Garzonio, R., Di Mauro, B., Colombo, R., Cogliati, S., 2017. ഒരു ചെറിയ ഹൈപ്പർസ്പെക്ട്രൽ UAS ഉപയോഗിച്ച് ഉപരിതല പ്രതിഫലനവും സൺഇൻഡുഡ് ഫ്ലൂറസെൻസ് സ്പെക്ട്രോസ്കോപ്പി അളവുകളും. റിമോട്ട് സെൻസിംഗ് 9 (5), 472. https://doi.org/10.3390/rs9050472. Gaˇsparovi´c, M., Zrinjski, M., Barkovi´c, Đ., Radoˇcaj, D., 2020. ഇതിനായുള്ള ഒരു ഓട്ടോമാറ്റിക് രീതി
UAV ഇമേജറിയെ അടിസ്ഥാനമാക്കി ഓട്സ് വയലുകളിൽ കള മാപ്പിംഗ്. കമ്പ്യൂട്ട്. ഇലക്ട്രോൺ. അഗ്രിക്.
Gebbers, R., Adamchuk, VI, 2010. കൃത്യമായ കൃഷിയും ഭക്ഷ്യസുരക്ഷയും. സയൻസ് 327 (5967), 828–831. https://doi.org/10.1126/science.1183899.
Geipel, J., Link, J., Claupein, W., 2014. ആളില്ലാ വിമാന സംവിധാനം ഉപയോഗിച്ച് കരസ്ഥമാക്കിയ ആകാശ ചിത്രങ്ങളും ക്രോപ്പ് ഉപരിതല മോഡലുകളും അടിസ്ഥാനമാക്കിയുള്ള കോൺ വിളവിൻ്റെ സംയോജിത സ്പെക്ട്രൽ, സ്പേഷ്യൽ മോഡലിംഗ്. റിമോട്ട് സെൻസിംഗ് 6 (11), 10335–10355. https://doi.org/10.3390/rs61110335.
Geng, D., Feng, Y., Zhu, Q., 2020. ഉപയോക്താക്കൾക്കുള്ള സുസ്ഥിര രൂപകൽപ്പന: ഒരു സാഹിത്യ അവലോകനവും ബിബ്ലിയോമെട്രിക് വിശകലനവും. പരിസ്ഥിതി. ശാസ്ത്രം. മലിനീകരണം. Res. 27 (24), 29824–29836. https://doi. org/10.1007/s11356-020-09283-1.
Gevaert, CM, Suomalainen, J., Tang, J., Kooistra, L., 2015. മൾട്ടിസ്പെക്ട്രൽ സാറ്റലൈറ്റും ഹൈപ്പർസ്പെക്ട്രലും സംയോജിപ്പിച്ച് സ്പെക്ട്രൽ ടെമ്പറൽ റെസ്പോൺസ് സർഫേസുകളുടെ ജനറേഷൻ
കൃത്യമായ കാർഷിക ആപ്ലിക്കേഷനുകൾക്കുള്ള യുഎവി ഇമേജറി. ഐഇഇഇ ജെ. സെൽ. മുകളിൽ. ആപ്പ്. എർത്ത് ഒബ്സ്. റിമോട്ട് സെൻസ് 8 (6), 3140–3146. ttps://doi.org/10.1109/JSTARS.2015.2406339.
Gill, SS, Chana, I., Buyya, R., 2017. IoT അധിഷ്ഠിത കൃഷി ഒരു ക്ലൗഡും വലിയ ഡാറ്റാ സേവനവും: ഡിജിറ്റൽ ഇന്ത്യയുടെ തുടക്കം. J. Org. കൂടാതെ എൻഡ് യൂസർ കമ്പ്യൂട്ട്. (JOEUC) 29 (4),
XXX - 1.
Gmür, M., 2006. കോ-സൈറ്റേഷൻ വിശകലനവും അദൃശ്യ കോളേജുകൾക്കായുള്ള തിരയലും: ഒരു രീതിശാസ്ത്രപരമായ വിലയിരുത്തൽ. സയൻറോമെട്രിക്സ് 57 (1), 27–57. https://doi.org/10.1023/
a:1023619503005.
Gnadinger, ¨ F., Schmidhalter, U., 2017. ആളില്ലാ ആകാശ വാഹനങ്ങൾ (UAVs) വഴി ചോളം ചെടികളുടെ ഡിജിറ്റൽ എണ്ണം. റിമോട്ട് സെൻസിംഗ് 9 (6). Https://doi.org/10.3390/rs9060544.
Gokto ¨ ǧan, AH, Sukkarieh, S., Bryson, M., Randle, J., Lupton, T., Hung, C., 2010. ഒരു റോട്ടറി-വിംഗ് ആളില്ലാ എയർ വെഹിക്കിൾ അക്വാട്ടിക് കള നിരീക്ഷണത്തിനും
മാനേജ്മെൻ്റ്. ജെ. ഇൻ്റൽ. റോബോട്ടിക് സിസ്റ്റം: തിയർ. ആപ്പ്. 57 (1–4), 467–484. https://doi. org/10.1007/s10846-009-9371-5.
Gomez-Cand ´ on, ´ D., De Castro, AI, Lopez-Granados, F., 2014. ഗോതമ്പിലെ കൃത്യമായ കാർഷിക ആവശ്യങ്ങൾക്കായി ആളില്ലാ ആകാശ വാഹന (UAV) ഇമേജറിയിൽ നിന്നുള്ള മൊസൈക്കുകളുടെ കൃത്യത വിലയിരുത്തൽ. കൃത്യമായി. അഗ്രിക്. 15 (1), 44–56. https://doi.org/10.1007/s11119-013-9335-4.
Gomez-Cand ´ on, ´ D., Virlet, N., Labbe, S., Jolivot, A., Regnard, J.-L., 2016. UAV സെൻസഡ് ഇമേജറി പ്രകാരം ട്രീ സ്കെയിലിലെ ജല സമ്മർദ്ദത്തിൻ്റെ ഫീൽഡ് ഫിനോടൈപ്പിംഗ് : എന്നതിനായുള്ള പുതിയ സ്ഥിതിവിവരക്കണക്കുകൾ
താപ ഏറ്റെടുക്കലും കാലിബ്രേഷനും. കൃത്യമായി. അഗ്രിക്. 17 (6), 786–800. https://doi.org/10.1007/s11119-016-9449-6.
Gonzalez-Dugo, V., Zarco-Tejada, PJ, Fereres, E., 2014. സിട്രസ് തോട്ടങ്ങളിലെ ജലക്ഷാമത്തിൻ്റെ സൂചകമായി വിള ജല സമ്മർദ്ദ സൂചിക ഉപയോഗിക്കുന്നതിൻ്റെ പ്രയോഗക്ഷമതയും പരിമിതികളും. അഗ്രിക്. വേണ്ടി. മെറ്ററോൾ. 198-199, 94-104. https://doi.org/10.1016/j. agroformet.2014.08.003.
Gonzalez-Dugo, V., Zarco-Tejada, P., Nicolas, ´ E., Nortes, PA, Alarcon, ´ JJ, Intrigliolo, DS, Fereres, E., 2013. ഉയർന്ന റെസല്യൂഷൻ UAV തെർമൽ ഇമേജറി ഉപയോഗിച്ച്
ഒരു വാണിജ്യ തോട്ടത്തിനുള്ളിലെ അഞ്ച് ഫലവൃക്ഷങ്ങളുടെ ജലത്തിൻ്റെ അവസ്ഥയിലെ വ്യതിയാനം വിലയിരുത്തുക. കൃത്യമായി. അഗ്രിക്. 14 (6), 660–678. https://doi.org/10.1007/s11119-013-9322-9.
ഗോയൽ, കെ., കുമാർ, എസ്., 2021. സാമ്പത്തിക സാക്ഷരത: ഒരു ചിട്ടയായ അവലോകനവും ബിബ്ലിയോമെട്രിക് വിശകലനവും. Int. ജെ. കൺസ്യൂമർ സ്റ്റഡീസ് 45 (1), 80–105. https://doi.org/10.1111/
ijcs.12605.
Grenzdorffer, ¨ GJ, Engel, A., Teichert, B., 2008. വനവൽക്കരണത്തിലും കൃഷിയിലും കുറഞ്ഞ ചെലവിലുള്ള യുവാക്കളുടെ ഫോട്ടോഗ്രാമെട്രിക് സാധ്യതകൾ. ഇൻ്റർനാഷണൽ ആർക്കൈവ്സ് ഓഫ് ഫോട്ടോഗ്രാമെട്രി, റിമോട്ട് സെൻസിംഗ്, സ്പേഷ്യൽ ഇൻഫർമേഷൻ സയൻസസ് - ISPRS ആർക്കൈവ്സ് 37, 1207–1213. https://www.scopus.com/inward/record.uri?eid=2-s2.0-85039543258&partnerI D=40&md5=b4b2d639257e8ddb5a373d15959c4e1e.
ഗുവാൻ, എസ്., ഫുകാമി, കെ., മാറ്റ്സുനാക, എച്ച്., ഒകാമി, എം., തനക, ആർ., നകാനോ, എച്ച്., സകായ്, ടി., നകാനോ, കെ., ഒഹ്ദാൻ, എച്ച്., തകഹാഷി, കെ., 2019. ഉയർന്ന റെസല്യൂഷൻ്റെ പരസ്പരബന്ധം വിലയിരുത്തുന്നു
ചെറുകിട UAV-കൾ ഉപയോഗിച്ച് നെല്ല്, ഗോതമ്പ് വിളകളുടെ വളപ്രയോഗ നിലയും വിളവുമുള്ള NDVI. റിമോട്ട് സെൻസിംഗ് 11 (2), 112.
Gundolf, K., Filser, M., 2013. മാനേജ്മെൻ്റ് ഗവേഷണവും മതവും: ഒരു അവലംബ വിശകലനം. ജെ. ബസ്. എത്തിക്സ് 112 (1), 177–185.
Guo, Q., Zhu, Y., Tang, Y., Hou, C., He, Y., Zhuang, J., Zheng, Y., Luo, S., 2020. CFD സിമുലേഷനും സ്പേഷ്യലിൻ്റെ പരീക്ഷണാത്മക പരിശോധനയും കൂടാതെ താൽക്കാലിക വിതരണങ്ങളും
ഹോവറിൽ ഒരു ക്വാഡ്-റോട്ടർ അഗ്രിക്കൾച്ചറൽ യുഎവിയുടെ ഡൗൺവാഷ് എയർ ഫ്ലോ. കമ്പ്യൂട്ട്. ഇലക്ട്രോൺ. അഗ്രിക്. 172, 105343 https://doi.org/10.1016/j.compag.2020.105343.
ഹഗിഘട്ടലാബ്, എ., ഗോൺസാലെസ് പെരെസ്, എൽ., മൊണ്ടൽ, എസ്., സിംഗ്, ഡി., ഷിൻസ്റ്റോക്ക്, ഡി., റുട്കോസ്കി, ജെ., ഓർട്ടിസ്-മൊണാസ്റ്റീരിയോ, ഐ., സിംഗ്, ആർപി, ഗുഡിൻ, ഡി. പോളണ്ട്, ജെ., 2016.
വലിയ ഗോതമ്പ് ബ്രീഡിംഗ് നഴ്സറികളുടെ ഉയർന്ന ത്രൂപുട്ട് ഫിനോടൈപ്പിംഗിനായി ആളില്ലാ ഏരിയൽ സംവിധാനങ്ങളുടെ പ്രയോഗം. പ്ലാൻ്റ് രീതികൾ 12 (1). https://doi.org/10.1186/s13007-
XXX - 016.
Hakala, T., Honkavaara, E., Saari, H., Makynen, ¨ J., Kaivosoja, J., Pesonen, L., & Pol ¨ onen, ¨I., 2013. UAV-കളിൽ നിന്നുള്ള സ്പെക്ട്രൽ ഇമേജിംഗ്. . GG ബിൽ R. (എഡ്.), ഇൻ്റർനാഷണൽ ആർക്കൈവ്സ് ഓഫ് ഫോട്ടോഗ്രാമെട്രി, റിമോട്ട് സെൻസിംഗ് ആൻഡ് സ്പേഷ്യൽ ഇൻഫർമേഷൻ സയൻസസ്-ISPRS ആർക്കൈവ്സ് (വാല്യം 40, ലക്കം 1W2, പേജ്. 189-194). ഇൻ്റർനാഷണൽ സൊസൈറ്റി ഫോർ ഫോട്ടോഗ്രാമെട്രി ആൻഡ് റിമോട്ട് സെൻസിംഗ്. https://www.scopus.com/inward/record.uri?eid=2-s2.0-848875632.
Hamylton, SM, Morris, RH, Carvalho, RC, Roder, N., Barlow, P., Mills, K., Wang, L. ആളില്ലാ ആകാശത്ത് നിന്ന് ദ്വീപ് സസ്യങ്ങളെ മാപ്പിംഗ് ചെയ്യുന്നതിനുള്ള സാങ്കേതിക വിദ്യകൾ
വാഹന (UAV) ചിത്രങ്ങൾ: പിക്സൽ വർഗ്ഗീകരണം, ദൃശ്യ വ്യാഖ്യാനം, മെഷീൻ ലേണിംഗ് സമീപനങ്ങൾ. Int. ജെ. ആപ്പ്. എർത്ത് ഒബ്സ്. ജിയോഇൻഫ്. 89, 102085 https://doi.org/
10.1016/j.jag.2020.102085.
Haque, A., Islam, N., Samrat, NH, Dey, S., Ray, B., 2021. ബംഗ്ലാദേശിലെ ഉത്തരവാദിത്ത നേതൃത്വത്തിലൂടെ മികച്ച കൃഷി: സാധ്യതകളും അവസരങ്ങളും അതിനപ്പുറവും.
സുസ്ഥിരത 13 (8), 4511.
Hardin, PJ, Hardin, TJ, 2010. പരിസ്ഥിതി ഗവേഷണത്തിൽ ചെറിയ തോതിലുള്ള റിമോട്ട് പൈലറ്റഡ് വാഹനങ്ങൾ. ഭൂമിശാസ്ത്ര കോമ്പസ് 4 (9), 1297–1311. ttps://doi.org/10.1111/j.1749-
8198.2010.00381.x.
Hardin, PJ, Jensen, RR, 2011. പരിസ്ഥിതി റിമോട്ട് സെൻസിംഗിൽ ചെറിയ തോതിലുള്ള ആളില്ലാ വിമാനങ്ങൾ: വെല്ലുവിളികളും അവസരങ്ങളും. GISci. റിമോട്ട് സെൻസ് 48 (1), 99–111. https://doi.org/10.2747/1548-1603.48.1.99.
He, Y., Nie, P., Zhang, Q., Liu, F., 2021. അഗ്രികൾച്ചറൽ ഇൻ്റർനെറ്റ് ഓഫ് തിംഗ്സ്: ടെക്നോളജികളും ആപ്ലിക്കേഷനുകളും, (1-ആം പതിപ്പ്. 2021 പതിപ്പ്). സ്പ്രിംഗർ.
ഹെർവിറ്റ്സ്, എസ്ആർ, ജോൺസൺ, എൽഎഫ്, ഡുനാഗൻ, എസ്ഇ, ഹിഗ്ഗിൻസ്, ആർജി, സള്ളിവൻ, ഡിവി, ഷെങ്, ജെ., ലോബിറ്റ്സ്, ബിഎം, ല്യൂങ്, ജെജി, ഗാൽമെയർ, ബിഎ, അയോഗി, എം., സ്ലൈ, ആർഇ, ബ്രാസ്, ജെഎ, 2004.
ആളില്ലാ ആകാശ വാഹനത്തിൽ നിന്നുള്ള ഇമേജിംഗ്: കാർഷിക നിരീക്ഷണവും തീരുമാന പിന്തുണയും. കമ്പ്യൂട്ട്. ഇലക്ട്രോൺ. അഗ്രിക്. 44 (1), 49–61. https://doi.org/10.1016/j.
compag.2004.02.006.
Holman, FH, Riche, AB, Michalski, A., Castle, M., Wooster, MJ, Hawkesford, MJ, UAV അടിസ്ഥാനമാക്കിയുള്ള റിമോട്ട് സെൻസിംഗ് ഉപയോഗിച്ച് ഫീൽഡ് പ്ലോട്ട് ട്രയലുകളിൽ ഗോതമ്പ് ചെടികളുടെ ഉയരവും വളർച്ചാ നിരക്കും ഉയർന്ന ത്രൂപുട്ട് ഫീൽഡ് ഫിനോടൈപ്പിംഗ്. റിമോട്ട് സെൻസിംഗ് 8 (12). https://doi. org/10.3390/rs8121031.
Honkavaara, E., Saari, H., Kaivosoja, J., Pol ¨ onen, ¨ I., Hakala, T., Litkey, P., M¨kynen, J., Pesonen, L., 2013. പ്രോസസ്സിംഗും വിലയിരുത്തലും കൃത്യമായ കൃഷിക്കായി ഭാരം കുറഞ്ഞ UAV സ്പെക്ട്രൽ ക്യാമറ ഉപയോഗിച്ച് ശേഖരിച്ച സ്പെക്ട്രോമെട്രിക്, സ്റ്റീരിയോസ്കോപ്പിക് ഇമേജറി. റിമോട്ട് സെൻസിംഗ് 5 (10), 5006–5039. https://doi.org/10.3390/rs5105006.
Hossein Motlagh, N., Taleb, T., Arouk, O., 2016. താഴ്ന്ന ഉയരത്തിലുള്ള ആളില്ലാ ആകാശ വാഹനങ്ങൾ അടിസ്ഥാനമാക്കിയുള്ള ഇൻ്റർനെറ്റ് സേവനങ്ങൾ: സമഗ്രമായ സർവേയും ഭാവി കാഴ്ചപ്പാടുകളും. IEEE ഇൻ്റർനെറ്റ് കാര്യങ്ങൾ J. 3 (6), 899–922. https://doi.org/10.1109/JIOT.2016.2612119.
Hrabar, S., Sukhatme, GS, Corke, P., Usher, K., Roberts, J., 2005. UAV-ക്കായുള്ള നഗര മലയിടുക്കുകളുടെ സംയോജിത ഒപ്റ്റിക്-ഫ്ലോ, സ്റ്റീരിയോ അധിഷ്ഠിത നാവിഗേഷൻ. ഇൻ: 2005 IEEE/RSJ
ഇൻ്റലിജൻ്റ് റോബോട്ടുകളും സിസ്റ്റങ്ങളും സംബന്ധിച്ച ഇൻ്റർനാഷണൽ കോൺഫറൻസ്, പേജ്. 3309–3316. https://doi.org/10.1109/IROS.2005.1544998.
Hsu, T.-C., Yang, H., Chung, Y.-C., Hsu, C.-H., 2020. ക്ലൗഡ് ഫോഗ് കമ്പ്യൂട്ടിംഗിനായുള്ള ഒരു ക്രിയേറ്റീവ് IoT കാർഷിക പ്ലാറ്റ്ഫോം. നിലനിർത്തുക. കമ്പ്യൂട്ട്. Inf. സിസ്റ്റർ. 28, 100285.
Huang, H., Deng, J., Lan, Y., Yang, A., Deng, X., Zhang, L., Gonzalez-Andujar, JL, 2018. ആളില്ലാ ആകാശ വാഹനത്തിൻ്റെ കള മാപ്പിംഗിനുള്ള ഒരു പൂർണ്ണമായ പരിവർത്തന ശൃംഖല ( UAV) ഇമേജറി. PLoS ONE 13 (4), e0196302.
Huang, H., Lan, Y., Yang, A., Zhang, Y., Wen, S., Deng, J., 2020. UAV ഇമേജറിയുടെ കള മാപ്പിംഗിൽ ഒബ്ജക്റ്റ് അധിഷ്ഠിത ഇമേജ് അനാലിസിസ് (OBIA) എന്നിവയ്ക്കെതിരായ ആഴത്തിലുള്ള പഠനം. Int. ജെ.
റിമോട്ട് സെൻസ് 41 (9), 3446–3479. https://doi.org/10.1080/01431161.2019.1706112.
ഹുവാങ്, എച്ച്., യാങ്, എ., ടാങ്, വൈ., ഷുവാങ്, ജെ., ഹൗ, സി., ടാൻ, ഇസഡ്., ദനഞ്ജയൻ, എസ്., ഹെ, വൈ., ഗുവോ, ക്യൂ., ലുവോ, എസ്., 2021. ക്രോപ്പ് മോണിറ്ററിംഗിൽ UAV ഇമേജറിയുടെ ആഴത്തിലുള്ള വർണ്ണ കാലിബ്രേഷൻ
സെമാൻ്റിക് ശൈലി കൈമാറ്റം ഉപയോഗിച്ച് പ്രാദേശികമായി ആഗോള ശ്രദ്ധയിലേക്ക്. Int. ജെ. ആപ്പ്. എർത്ത് ഒബ്സ്. ജിയോഇൻഫ്. 104, 102590 https://doi.org/10.1016/j.jag.2021.102590.
Huang, YB, Thomson, SJ, Hoffmann, WC, Lan, YB, Fritz, BK, 2013. കാർഷിക ഉൽപ്പാദനത്തിനായുള്ള ആളില്ലാ വിമാന സാങ്കേതിക വിദ്യകളുടെ വികസനവും സാധ്യതയും
മാനേജ്മെൻ്റ്. Int. ജെ. അഗ്രിക്. ബയോൾ. എൻജിനീയർ. 6 (3), 1–10. https://doi.org/10.3965/j. ഇജാബെ.20130603.001.
Huang, Y., Hoffmann, WC, Lan, Y., Wu, W., Fritz, BK, 2009. ആളില്ലാ ആകാശ വാഹന പ്ലാറ്റ്ഫോമിനായി ഒരു സ്പ്രേ സംവിധാനം വികസിപ്പിക്കുക. ആപ്പ്. എൻജിനീയർ. അഗ്രിക്. 25 (6), 803–809.
Hunt Jr., ER, Dean Hively, W., Fujikawa, SJ, Linden, DS, Daughtry, CST, McCarty, GW, 2010. NIR-ഗ്രീൻ-ബ്ലൂ ഡിജിറ്റൽ ഫോട്ടോഗ്രാഫുകൾ ഏറ്റെടുക്കൽ
വിള നിരീക്ഷണത്തിനായി ആളില്ലാ വിമാനം. റിമോട്ട് സെൻസിംഗ് 2 (1), 290–305. https://doi. org/10.3390/rs2010290. Inoue, Y., 2020. സ്മാർട്ട് ഫാമിംഗിനായി വിളകളുടെയും മണ്ണിൻ്റെയും ഉപഗ്രഹവും ഡ്രോണും അടിസ്ഥാനമാക്കിയുള്ള വിദൂര സംവേദനം-ഒരു അവലോകനം. മണ്ണ് ശാസ്ത്രം. ചെടി നട്ട്. 66 (6), 798-810. https://doi.org/10.1080/00380768.2020.1738899.
ഇസ്ലാം, എൻ., റാഷിദ്, എംഎം, പസന്ദിഡെ, എഫ്., റേ, ബി., മൂർ, എസ്., കേഡൽ, ആർ., 2021. ഇൻ്റർനെറ്റ് ഓഫ് തിംഗ്സിനായി (ഐഒടി) ആപ്ലിക്കേഷനുകളുടെയും ആശയവിനിമയ സാങ്കേതികവിദ്യകളുടെയും അവലോകനം
ആളില്ലാ ഏരിയൽ വെഹിക്കിൾ (UAV) അടിസ്ഥാനമാക്കിയുള്ള സുസ്ഥിര സ്മാർട്ട് ഫാമിംഗ്. സുസ്ഥിരത 13 (4), 1821. https://doi.org/10.3390/su13041821.
Jaud, M., Passot, S., Le Bivic, R., Delacourt, C., Grandjean, P., Le Dantec, N., 2016. ഉയർന്ന റെസല്യൂഷൻ ഡിജിറ്റൽ ഉപരിതല മോഡലുകളുടെ കൃത്യത കണക്കാക്കുന്നത്
PhotoScan®, MicMac® എന്നിവ ഉപ-ഒപ്റ്റിമൽ സർവേ സാഹചര്യങ്ങളിൽ. റിമോട്ട് സെൻസിംഗ് 8 (6), https://doi.org/10.3390/rs8060465.
ജിമെനെസ്-ബ്രെനെസ്, എഫ്എം, ലോപ്പസ്-ഗ്രനാഡോസ്, എഫ്., കാസ്ട്രോ, എഐ, ടോറസ്-എസ് ആഞ്ചസ്, ജെ., സെറാനോ, എൻ., പെന, ˜ ജെഎം, 2017. ഒലിവ് ട്രീ ആർക്കിടെക്ചറിലും വാർഷികത്തിലുമുള്ള അരിവാൾ ആഘാതങ്ങൾ കണക്കാക്കുന്നു UAV അടിസ്ഥാനമാക്കിയുള്ള 3D മോഡലിംഗ് ഉപയോഗിച്ച് മേലാപ്പ് വളർച്ച. പ്ലാൻ്റ് രീതികൾ 13 (1). https://doi.org/10.1186/s13007-017-0205-3.
Jin, X., Liu, S., Baret, F., Hemerl´e, M., Comar, A., 2017. വളരെ താഴ്ന്ന ഉയരത്തിലുള്ള UAV ഇമേജറിയിൽ നിന്ന് ഉയർന്നുവരുന്ന ഗോതമ്പ് വിളകളുടെ സസ്യ സാന്ദ്രതയുടെ ഏകദേശ കണക്കുകൾ. റിമോട്ട് സെൻസ്.
പരിസ്ഥിതി. 198, 105-114. https://doi.org/10.1016/j.rse.2017.06.007.
Jinbo, C., Xiangliang, C., Han-Chi, F., Lam, A., 2019. ക്ലൗഡ് കമ്പ്യൂട്ടിംഗ് പിന്തുണയ്ക്കുന്ന കാർഷിക ഉൽപ്പന്ന നിരീക്ഷണ സംവിധാനം. ക്ലസ്റ്റർ കമ്പ്യൂട്ട്. 22 (4), 8929–8938.
ജു, സി., & സൺ, HI 2018a. കാർഷിക മേഖലയിലെ റിമോട്ട് സെൻസിംഗിനായി ഒന്നിലധികം യുഎവി സംവിധാനങ്ങളുടെ പ്രകടന വിലയിരുത്തൽ. ഐഇഇഇ ഇൻ്റർനാഷണൽ കോൺഫറൻസ് ഓൺ റോബോട്ടിക്സ് ആൻഡ് ഓട്ടോമേഷൻ (ഐസിആർഎ), ഓസ്ട്രേലിയ, ഓസ്ട്രേലിയ, 21–26, റോബോട്ടിക് വിഷൻ ആൻഡ് ആക്ഷൻ ഇൻ അഗ്രികൾച്ചറിലെ വർക്ക്ഷോപ്പിൻ്റെ നടപടിക്രമങ്ങൾ.
ജു, സി., സൺ, എച്ച്ഐ, 2018ബി. കാർഷിക ആപ്ലിക്കേഷനുകൾക്കായുള്ള ഒന്നിലധികം UAV സംവിധാനങ്ങൾ: നിയന്ത്രണം, നടപ്പിലാക്കൽ, വിലയിരുത്തൽ. ഇലക്ട്രോണിക്സ് 7 (9), 162. https://doi.org/10.3390/
ഇലക്ട്രോണിക്സ്7090162.
ജംഗ്, ജെ., മൈദ, എം., ചാങ്, എ., ഭണ്ഡാരി, എം., ആശാപുരെ, എ., ലാൻഡീവർ-ബൗൾസ്, ജെ., 2021. റിമോട്ട് സെൻസിംഗിൻ്റെയും ആർട്ടിഫിഷ്യൽ ഇൻ്റലിജൻസിൻ്റെയും സാധ്യതകൾ മെച്ചപ്പെടുത്തുന്നതിനുള്ള ടൂളുകളായി
കാർഷിക ഉൽപാദന സംവിധാനങ്ങളുടെ പ്രതിരോധം. കറി. അഭിപ്രായം. ബയോടെക്നോൾ. 70, 15–22. https://doi.org/10.1016/j.copbio.2020.09.003.
കാലിസ്ചുക്ക്, എം., പാരറ്റ്, എം.എൽ, ഫ്രീമാൻ, ജെ.എച്ച്, രാജ്, ഡി., ഡാ സിൽവ, എസ്., യൂബാങ്ക്സ്, എസ്., വിഗ്ഗിൻസ്, ഡിജെ, ലോലർ, എം., മറോയിസ്, ജെജെ, മെല്ലിംഗർ, എച്ച്സി, ദാസ്, ജെ. , 2019. തണ്ണിമത്തനിലെ ഗമ്മി സ്റ്റെം ബ്ലൈറ്റിനുള്ള പരമ്പരാഗത സ്കൗട്ടിംഗ് പരിശീലനത്തിലേക്ക് ആളില്ലാ ആകാശ വാഹന-സഹായ മൾട്ടിസ്പെക്ട്രൽ ക്രോപ്പ് ഇമേജിംഗ് ഉൾപ്പെടുത്തുന്ന മെച്ചപ്പെട്ട ക്രോപ്പ് സ്കൗട്ടിംഗ് സാങ്കേതികത. പ്ലാൻ്റ് ഡിസ്. 103 (7), 1642–1650.
കപൂർ, കെകെ, തമിഴ്മണി, കെ., റാണ, എൻപി, പാട്ടീൽ, പി., ദ്വിവേദി, വൈ കെ, നെരൂർ, എസ്., 2018. സോഷ്യൽ മീഡിയ ഗവേഷണത്തിലെ പുരോഗതി: ഭൂതകാലവും വർത്തമാനവും ഭാവിയും. അറിയിക്കുക. സിസ്റ്റർ. ഫ്രണ്ട്. 20
(3), 531-558.
Kerkech, M., Hafiane, A., Canals, R., 2020. VddNet: മൾട്ടിസ്പെക്ട്രൽ ഇമേജുകളും ഡെപ്ത് മാപ്പും അടിസ്ഥാനമാക്കിയുള്ള വൈൻ ഡിസീസ് ഡിറ്റക്ഷൻ നെറ്റ്വർക്ക്. റിമോട്ട് സെൻസിംഗ് 12 (20), 3305. https://doi. org/10.3390/rs12203305.
Khaliq, A., Comba, L., Biglia, A., Ricauda Aimonino, D., Chiaberge, M., Gay, P., 2019. മുന്തിരിത്തോട്ടത്തിനായുള്ള ഉപഗ്രഹത്തിൻ്റെയും UAV അടിസ്ഥാനമാക്കിയുള്ള മൾട്ടിസ്പെക്ട്രൽ ഇമേജറിയുടെയും താരതമ്യം
വേരിയബിലിറ്റി വിലയിരുത്തൽ. റിമോട്ട് സെൻസിംഗ് 11 (4). https://doi.org/10.3390/rs11040436.
Khan, PW, Byun, Y.-C., Park, N., 2020. IoT-blockchain നൂതന ആഴത്തിലുള്ള പഠനം ഉപയോഗിച്ച് ഭക്ഷ്യ വ്യവസായത്തിനായി ഒപ്റ്റിമൈസ് ചെയ്ത പ്രൊവെനൻസ് സിസ്റ്റം 4.0 പ്രവർത്തനക്ഷമമാക്കി. സെൻസറുകൾ 20 (10), 2990.
Khan, RU, Khan, K., Albattah, W., Qamar, AM, Ullah, F., 2021. സസ്യരോഗങ്ങളുടെ ഇമേജ് അടിസ്ഥാനമാക്കിയുള്ള കണ്ടെത്തൽ: ക്ലാസിക്കൽ മെഷീൻ ലേണിംഗ് മുതൽ ആഴത്തിലുള്ള പഠന യാത്ര വരെ. വയർലെസ് കമ്മ്യൂൺ. മൊബൈൽ കമ്പ്യൂട്ട്. 2021, 1–13.
Khan, S., Tufail, M., Khan, MT, Khan, ZA, Iqbal, J., Alam, M., Le, KNQ, 2021. UAV അടിസ്ഥാനമാക്കിയുള്ള വിള/കള വർഗ്ഗീകരണത്തിനായുള്ള ഒരു നവീനമായ സെമി-മേൽനോട്ട ചട്ടക്കൂട്. PLoS ONE 16 (5), e0251008.
ഖനാൽ, എസ്., ഫുൾട്ടൺ, ജെ., ഷിയറർ, എസ്., 2017. കൃത്യമായ കൃഷിയിൽ തെർമൽ റിമോട്ട് സെൻസിംഗിൻ്റെ നിലവിലുള്ളതും സാധ്യതയുള്ളതുമായ ആപ്ലിക്കേഷനുകളുടെ ഒരു അവലോകനം. കമ്പ്യൂട്ട്. ഇലക്ട്രോൺ.
അഗ്രിക്. 139, 22-32. https://doi.org/10.1016/j.compag.2017.05.001.
ഖന്ന, എ., കൗർ, എസ്., 2019. ഇൻറർനെറ്റ് ഓഫ് തിംഗ്സിൻ്റെ (ഐഒടി) പരിണാമവും പ്രിസിഷൻ അഗ്രികൾച്ചർ മേഖലയിൽ അതിൻ്റെ കാര്യമായ സ്വാധീനവും. കമ്പ്യൂട്ട്. ഇലക്ട്രോൺ. അഗ്രിക്. 157, 218-231.
കിം, ഡബ്ല്യു., ഖാൻ, ജിഎഫ്, വുഡ്, ജെ., മഹ്മൂദ്, എംടി, 2016. സുസ്ഥിര സ്ഥാപനങ്ങൾക്കുള്ള ജീവനക്കാരുടെ ഇടപെടൽ: സോഷ്യൽ നെറ്റ്വർക്ക് വിശകലനവും പൊട്ടിത്തെറിയും ഉപയോഗിച്ചുള്ള കീവേഡ് വിശകലനം
കണ്ടെത്തൽ സമീപനം. സുസ്ഥിരത 8 (7), 631.
Kirsch, M., Lorenz, S., Zimmermann, R., Tusa, L., Mockel, ¨ R., Hodl, ¨ P., Booysen, R., Khodadadzadeh, M., Gloaguen, R., 2018. ഏകീകരണം ഭൗമവും ഡ്രോണും
പര്യവേക്ഷണ മാപ്പിംഗിനും ഖനന നിരീക്ഷണത്തിനുമുള്ള ഹൈപ്പർസ്പെക്ട്രൽ, ഫോട്ടോഗ്രാമെട്രിക് സെൻസിംഗ് രീതികൾ. റിമോട്ട് സെൻസിംഗ് 10 (9), 1366. https://doi.org/10.3390/
rs10091366.
Kitano, BT, Mendes, CCT, Geus, AR, Oliveira, HC, Souza, JR, 2019. ആഴത്തിലുള്ള പഠനവും UAV ചിത്രങ്ങളും ഉപയോഗിച്ച് ധാന്യം ചെടികളുടെ എണ്ണൽ. IEEE ജിയോസ്കി. റിമോട്ട് സെൻസ് ലെറ്റ്. 1–5 https://doi.org/10.1109/LGRS.2019.2930549.
Koh, JCO, Spangenberg, G., Kant, S., 2021. ഹൈ ത്രൂപുട്ട് ഇമേജ് അധിഷ്ഠിത പ്ലാൻ്റ് ഫിനോടൈപ്പിംഗിനായി ഓട്ടോമേറ്റഡ് മെഷീൻ ലേണിംഗ്. റിമോട്ട് സെൻസിംഗ് 13 (5), 858. https://
doi.org/10.3390/rs13050858.
കോവലെവ്, IV, വോറോഷിലോവ, എഎ, 2020. കാർഗോ യുഎവികളുടെ ആവാസവ്യവസ്ഥയുടെ വികസനത്തിലെ ആധുനിക സാങ്കേതിക പ്രവണതകൾ. ജെ. ഫിസി. കോൺഫ്. സെർ. 1515 (5), 052068 https://doi. org/10.1088/1742-6596/1515/5/052068.
Krul, S., Pantos, C., Frangulea, M., Valente, J., 2021. മോണോക്യുലർ ക്യാമറയുള്ള ഒരു ചെറിയ ഡ്രോൺ ഉപയോഗിച്ച് ഇൻഡോർ കന്നുകാലികൾക്കും കൃഷിക്കുമുള്ള വിഷ്വൽ SLAM: ഒരു സാധ്യതാ പഠനം.
ഡ്രോണുകൾ 5 (2), 41. https://doi.org/10.3390/drones5020041.
Kulbacki, M., Segen, J., Kniec, W., Klempous, R., Kluwak, K., Nikodem, J., Kulbaka, J., Serester, A., 2018. കാർഷിക ഓട്ടോമേഷനായുള്ള ഡ്രോണുകളുടെ സർവേ നടീൽ മുതൽ
വിളവെടുപ്പ്. ഇൻ: INES 2018 - IEEE 22-ാമത് ഇൻ്റർനാഷണൽ കോൺഫറൻസ് ഓൺ ഇൻ്റലിജൻ്റ് എഞ്ചിനീയറിംഗ് സിസ്റ്റംസ്, പേജ്. 000353–358. https://doi.org/10.1109/INES.2018.8523943.
Lagkas, T., Argyriou, V., Bibi, S., Sarigiannidis, P., 2018. UAV IoT ചട്ടക്കൂട് വീക്ഷണങ്ങളും വെല്ലുവിളികളും: ഡ്രോണുകളെ "കാര്യങ്ങൾ" ആയി സംരക്ഷിക്കുന്നതിന്. സെൻസറുകൾ 18 (11), 4015. https://doi.org/10.3390/s18114015.
ലാലിബെർട്ടെ, എഎസ്, രംഗോ, എ., 2011. ആളില്ലാ വിമാനം വരണ്ട ഭൂമിയിൽ നിന്ന് ലഭിച്ച സബ്-ഡെസിമീറ്റർ ഇമേജറിയുടെ വിശകലനത്തിനായുള്ള ഇമേജ് പ്രോസസ്സിംഗും വർഗ്ഗീകരണ നടപടിക്രമങ്ങളും
റേഞ്ച് ലാൻഡ്സ്. GISci. റിമോട്ട് സെൻസ് 48 (1), 4–23. https://doi.org/10.2747/1548-1603.48.1.4.
Laliberte, AS, Rango, A., Herrick, JE, 2007. റേഞ്ച്ലാൻഡ് മാപ്പിംഗിനും നിരീക്ഷണത്തിനുമുള്ള ആളില്ലാ ആകാശ വാഹനങ്ങൾ: രണ്ട് സിസ്റ്റങ്ങളുടെ താരതമ്യം. ASPRS വാർഷിക കോൺഫറൻസ് നടപടികൾ.
Lam, OHY, Dogotari, M., Prüm, M., Vithlani, HN, Roers, C., Melville, B., Zimmer, F., Becker, R., 2021. നേറ്റീവ് ഗ്രാസ്ലാൻഡിലെ കള മാപ്പിംഗിനുള്ള ഒരു ഓപ്പൺ സോഴ്സ് വർക്ക്ഫ്ലോ
ആളില്ലാ ആകാശ വാഹനം ഉപയോഗിക്കുന്നത്: ഒരു കേസ് സ്റ്റഡിയായി Rumex obtusifolius ഉപയോഗിക്കുന്നു. യൂറോ. ജെ.റിമോട്ട് സെൻസ് 54 (sup1), 71–88. https://doi.org/10.1080/22797254.2020.1793687.
Lambert, DM, Lowenberg-DeBoer, J., Griffin, TW, Peone, J., Payne, T., Daberkow, SG, 2004. ദത്തെടുക്കൽ, ലാഭം, കൃത്യമായ കൃഷി ഡാറ്റയുടെ മികച്ച ഉപയോഗം.
വർക്കിംഗ് പേപ്പർ. പർഡ്യൂ യൂണിവേഴ്സിറ്റി. https://doi.org/10.22004/ag.econ.28615.
Lelong, CCD, Burger, P., Jubelin, G., Roux, B., Labbe, S., Baret, F., 2008. ചെറിയ പ്ലോട്ടുകളിലെ ഗോതമ്പ് വിളയുടെ അളവ് നിരീക്ഷിക്കുന്നതിനായി ആളില്ലാ ആകാശ വാഹന ചിത്രങ്ങളുടെ വിലയിരുത്തൽ. സെൻസറുകൾ 8 (5), 3557–3585. https://doi.org/10.3390/s8053557.
ലി, സി., നിയു, ബി., 2020. ബിഗ് ഡാറ്റയും ഇൻ്റർനെറ്റ് ഓഫ് തിങ്സും അടിസ്ഥാനമാക്കിയുള്ള സ്മാർട്ട് കൃഷിയുടെ രൂപകൽപ്പന. Int. ജെ. ഡിസ്ട്രിബ്. സെൻസ് നെറ്റ്. 16 (5) ttps://doi.org/10.1177/1550147720917065.
Li, W., Niu, Z., Chen, H., Li, D., Wu, M., Zhao, W., 2016. ഉയർന്ന റെസല്യൂഷൻ സ്റ്റീരിയോ ഇമേജുകൾ ഉപയോഗിച്ച് ചോളത്തിൻ്റെ മേലാപ്പ് ഉയരത്തിൻ്റെയും ഭൂഗർഭ ബയോമാസിൻ്റെയും റിമോട്ട് എസ്റ്റിമേഷൻ ചെലവ് കുറഞ്ഞ ആളില്ലാ ആകാശ വാഹന സംവിധാനം. ഇക്കോൾ. ഇൻഡ്. 67, 637–648. https://doi.org/10.1016/j.ecolind.2016.03.036.
Liakos, KG, Busato, P., Moshou, D., Pearson, S., Bochtis, D., 2018. കാർഷിക മേഖലയിലെ യന്ത്ര പഠനം: ഒരു അവലോകനം. സെൻസറുകൾ 18 (8), 2674.
Liebisch, F., Kirchgessner, N., Schneider, D., Walter, A., Hund, A., 2015. ഒരു മൊബൈൽ മൾട്ടി-സെൻസർ സമീപനം ഉപയോഗിച്ച് ചോളം സ്വഭാവങ്ങളുടെ വിദൂര, ഏരിയൽ ഫിനോടൈപ്പിംഗ്. പ്ലാൻ്റ് രീതികൾ 11 (1), 9. https://doi.org/10.1186/s13007-015-0048-8.
Lin, Z., Guo, W., 2020. ആളില്ലാ ഏരിയൽ സിസ്റ്റം ഇമേജുകളും ആഴത്തിലുള്ള പഠനവും ഉപയോഗിച്ച് സോർഗം പാനിക്കിൾ കണ്ടെത്തലും എണ്ണലും. ഫ്രണ്ട്. പ്ലാൻ്റ് സയൻസ്. 11.
Liu, S., Guo, L., Webb, H., Ya, X., Chang, X., 2019. ക്ലൗഡ് കമ്പ്യൂട്ടിംഗിനെ അടിസ്ഥാനമാക്കിയുള്ള ആധുനിക ഇക്കോ അഗ്രികൾച്ചറിൻ്റെ ഇൻ്റർനെറ്റ് ഓഫ് തിംഗ്സ് മോണിറ്ററിംഗ് സിസ്റ്റം. IEEE ആക്സസ് 7, 37050–37058.
Lopez-Granados, ´ F., 2011. സൈറ്റ്-നിർദ്ദിഷ്ട കള മാനേജ്മെൻ്റിനുള്ള കള കണ്ടെത്തൽ: മാപ്പിംഗും തത്സമയ സമീപനങ്ങളും. കള റെസ്. 51 (1), 1–11. https://doi.org/10.1111/j.1365-3180.2010.00829.x.
ലോപ്പസ്-ഗ്രനാഡോസ്, എഫ്., ടോറസ്-സാഞ്ചസ്, ´ ജെ., ഡി കാസ്ട്രോ, എ.-ഐ., സെറാനോ-പെറസ്, എ., മെസാസ്കാരാസ്കോസ, എഫ്.-ജെ., പെന, ˜ ജെ.-എം. , 2016. ഉയർന്ന റെസല്യൂഷൻ UAV ഇമേജറി ഉപയോഗിച്ച് പുല്ല് വിളയിലെ പുല്ല് കളയുടെ ഒബ്ജക്റ്റ് അടിസ്ഥാനമാക്കിയുള്ള ആദ്യകാല നിരീക്ഷണം. അഗ്രോൺ. നിലനിർത്തുക. ദേവ്. 36 (4), 1–12
ലോപ്പസ്-ഗ്രനാഡോസ്, എഫ്., ടോറസ്-എസ്´ ആഞ്ചെസ്, ജെ., സെറാനോ-പെറസ്, എ., ഡി കാസ്ട്രോ, എഐ, മെസാസ്കാരാസ്കോസ, എഫ്.-ജെ., പെന, ˜ ജെ.-എം., 2016. യുഎവി സാങ്കേതികവിദ്യ ഉപയോഗിച്ച് സൂര്യകാന്തിയിലെ ആദ്യകാല കള മാപ്പിംഗ്: കള ത്രെഷോൾഡിനെതിരായ കളനാശിനി ചികിത്സ മാപ്പുകളുടെ വേരിയബിലിറ്റി. കൃത്യമായി. അഗ്രിക്. 17 (2), 183-199.
Lucieer, A., Malenovský, Z., Veness, T., Wallace, L., 2014. HyperUAS - ഒരു മൾട്ടിറോട്ടർ ആളില്ലാ വിമാന സംവിധാനത്തിൽ നിന്നുള്ള ഇമേജിംഗ് സ്പെക്ട്രോസ്കോപ്പി. ജെ. ഫീൽഡ് റോബ്. 31 (4),
571–590. https://doi.org/10.1002/rob.21508.
Lumme, J., Karjalainen, M., Kartinen, H., Kukko, A., Hyyppa, ¨ J., Hypp¨ a, H., Jaakkola, A., & Kleemola, J., 2008. ടെറസ്ട്രിയൽ ലേസർ സ്കാനിംഗ് കാർഷിക വിളകൾ. ജെജെയിൽ
ചെൻ ജെ മാസ് എച്ച്-ജി. (എഡ്.), ഇൻ്റർനാഷണൽ ആർക്കൈവ്സ് ഓഫ് ഫോട്ടോഗ്രാമെട്രി, റിമോട്ട് സെൻസിംഗ് ആൻഡ് സ്പേഷ്യൽ ഇൻഫർമേഷൻ സയൻസസ്-ISPRS ആർക്കൈവ്സ് (വാല്യം 37, പേജ് 563–566).
ഇൻ്റർനാഷണൽ സൊസൈറ്റി ഫോർ ഫോട്ടോഗ്രാമെട്രി ആൻഡ് റിമോട്ട് സെൻസിംഗ്. https://www.scopus .com/inward/record.uri?eid=2-s2.0-84919356328&partnerID=40&md5=574
b802131a99d16318ce619a01ca1bf.
Ma, L., Li, M., Ma, X., Cheng, L., Du, P., Liu, Y., 2017. മേൽനോട്ടത്തിലുള്ള ഒബ്ജക്റ്റ് അടിസ്ഥാനമാക്കിയുള്ള ലാൻഡ്-കവർ ഇമേജ് വർഗ്ഗീകരണത്തിൻ്റെ അവലോകനം. ISPRS J. ഫോട്ടോഗ്രാം. റിമോട്ട് സെൻസ്. 130,
277–293. https://doi.org/10.1016/j.isprsjprs.2017.06.001.
Maes, WH, Steppe, K., 2019. കൃത്യമായ കൃഷിയിൽ ആളില്ലാ ആകാശ വാഹനങ്ങൾ ഉപയോഗിച്ച് റിമോട്ട് സെൻസിംഗിനുള്ള കാഴ്ചപ്പാടുകൾ. ട്രെൻഡ്സ് പ്ലാൻ്റ് സയൻസ്. 24 (2), 152–164. https://doi.org/10.1016/j.tplants.2018.11.007.
മൈമൈതിജിയാങ്, എം., ഗുലാം, എ., സിഡികെ, പി., ഹാർട്ട്ലിംഗ്, എസ്., മൈമൈറ്റിയിമിംഗ്, എം., പീറ്റേഴ്സൺ, കെ., ഷേവേഴ്സ്, ഇ., ഫിഷ്മാൻ, ജെ., പീറ്റേഴ്സൺ, ജെ., കദം, എസ്., ബർകെൻ, ജെ., ഫ്രിറ്റ്ഷി, എഫ്., 2017.
ആളില്ലാ ഏരിയൽ സിസ്റ്റം (UAS) - മൾട്ടി-സെൻസർ ഡാറ്റ ഫ്യൂഷനും എക്സ്ട്രീം ലേണിംഗ് മെഷീനും ഉപയോഗിച്ച് സോയാബീനിൻ്റെ ഫിനോടൈപ്പിംഗ്. ISPRS J. ഫോട്ടോഗ്രാം. റിമോട്ട് സെൻസ് 134, 43–58. https://doi.org/10.1016/j.isprsjprs.2017.10.011. മൈമൈതിജിയാങ്, എം., സാഗൻ, വി., സിഡികെ, പി., ഡാലോയ്, എഎം, എർക്ബോൾ, എച്ച്., ഫ്രിറ്റ്ഷി, എഫ്ബി, 2020.
സാറ്റലൈറ്റ്/യുഎവി ഡാറ്റ ഫ്യൂഷനും മെഷീൻ ലേണിംഗും ഉപയോഗിച്ച് വിള നിരീക്ഷണം. റിമോട്ട് സെൻസിംഗ് 12 (9), 1357. https://doi.org/10.3390/rs12091357.
മാൻഫ്രെഡ, എസ്., മക്കേബ്, എം., മില്ലർ, പി., ലൂക്കാസ്, ആർ., പജുലോ മാഡ്രിഗൽ, വി., മല്ലിനിസ്, ജി., ബെൻ ഡോർ, ഇ., ഹെൽമാൻ, ഡി., എസ്റ്റസ്, എൽ., സിറോളോ, ജി. ., മുള്ളേറോവ, ´ ജെ., ടൗറോ, എഫ്., ഡി ലിമ, എം., ഡി
ലിമ, ജെ., മാൾട്ടീസ്, എ., ഫ്രാൻസിസ്, എഫ്., കെയ്ലർ, കെ., കോവ്, എം., പെർക്സ്, എം., റൂയിസ്-പെറസ്, ജി., സു, ഇസഡ്., വിക്കോ, ജി., ടോത്ത് , ബി., 2018. ആളില്ലാ വ്യോമ സംവിധാനങ്ങളുടെ ഉപയോഗത്തെക്കുറിച്ച്
പരിസ്ഥിതി നിരീക്ഷണം. റിമോട്ട് സെൻസിംഗ് 10 (4), 641.
Marinko, RA, 1998. പ്രബന്ധങ്ങളിലെ വനിതാ പഠന ജേർണലുകളുടെ അവലംബങ്ങൾ, 1989, ദി സീരിയൽസ് ലൈബ്രേറിയൻ 35 (1–2), 29–44. https://doi.org/10.1300/J123v35n01_
03.
Masroor, R., Naeem, M., Ejaz, W., 2021. UAV-അസിസ്റ്റഡ് വയർലെസ് നെറ്റ്വർക്കുകളിലെ റിസോഴ്സ് മാനേജ്മെൻ്റ്: ഒരു ഒപ്റ്റിമൈസേഷൻ വീക്ഷണം. അഡ് ഹോക്ക് നെറ്റ്. 121, 102596 https://doi.org/10.1016/j.adhoc.2021.102596.
Matese, A., Di Gennaro, SF, 2018. മൾട്ടിസ്പെക്ട്രൽ, തെർമൽ, RGB ഹൈ റെസല്യൂഷൻ ഇമേജുകൾ എന്നിവയെ അടിസ്ഥാനമാക്കിയുള്ള മൾട്ടിസെൻസർ UAV പ്ലാറ്റ്ഫോമിൻ്റെ പ്രായോഗിക ആപ്ലിക്കേഷനുകൾ
മുന്തിരി കൃഷി. കൃഷി 8 (7), 116. https://doi.org/10.3390/agriculture8070116.
Matese, A., Di Gennaro, SF, 2021. പരമ്പരാഗത എൻഡിവിഐ സൂചികയ്ക്കപ്പുറം കൃത്യമായ മുന്തിരികൾച്ചറിൽ യുഎവിയുടെ ഉപയോഗം മുഖ്യധാരയിലെ പ്രധാന ഘടകമായി. ശാസ്ത്രം. പ്രതിനിധി 11 (1), 2721. https://doi.org/10.1038/s41598-021-81652-3.
മേറ്റ്സെ, എ., ടോസ്കാനോ, പി., ഡി ജെന്നാരോ, എസ്എഫ്, ജെനെസിയോ, എൽ., വക്കാരി, എഫ്പി, പ്രിമിസെറിയോ, ജെ., ബെല്ലി, സി., സാൽഡി, എ., ബിയാൻകോണി, ആർ., ജിയോലി, ബി., 2015 .യുഎവിയുടെ ഇൻ്റർകംപാരിസൺ, എയർക്രാഫ്റ്റ്
കൂടാതെ പ്രിസിഷൻ വൈറ്റികൾച്ചറിനുള്ള സാറ്റലൈറ്റ് റിമോട്ട് സെൻസിംഗ് പ്ലാറ്റ്ഫോമുകളും. റിമോട്ട് സെൻസിംഗ് 7 (3), 2971–2990. https://doi.org/10.3390/rs70302971.
Mazzia, V., Comba, L., Khaliq, A., Chiaberge, M., Gay, P., 2020. UAV, മെഷീൻ ലേണിംഗ് അധിഷ്ഠിതമായ ഒരു സാറ്റലൈറ്റ്-ഡ്രൈവ് വെജിറ്റേഷൻ ഇൻഡക്സിൻ്റെ സൂക്ഷ്മത
കൃഷി. സെൻസറുകൾ 20 (9), 2530. https://doi.org/10.3390/s20092530.
McCain, KW, 1990. ബൗദ്ധിക സ്ഥലത്ത് മാപ്പിംഗ് രചയിതാക്കൾ: ഒരു സാങ്കേതിക അവലോകനം. ജാം. Soc. വിവരം. ശാസ്ത്രം. 41 (6), 433–443.
Meinen, BU, Robinson, DT, 2021. അഗ്രികൾച്ചറൽ എറോഷൻ മോഡലിംഗ്: UAV ടൈം സീരീസ് ഡാറ്റ ഉപയോഗിച്ച് USLE, WEPP ഫീൽഡ്-സ്കെയിൽ എറോഷൻ എസ്റ്റിമേറ്റ് വിലയിരുത്തൽ. പരിസ്ഥിതി. മോഡൽ. സോഫ്റ്റ്വെയർ 137, 104962. https://doi.org/10.1016/j.envsoft.2021.104962.
Melville, B., Lucieer, A., Aryal, J., 2019. ഹൈപ്പർസ്പെക്ട്രൽ അൺമാൻഡ് എയർക്രാഫ്റ്റ് സിസ്റ്റം (UAS) ഇമേജറി ഉപയോഗിച്ച് താഴ്ന്ന പ്രദേശത്തെ നേറ്റീവ് ഗ്രാസ്ലാൻഡ് കമ്മ്യൂണിറ്റികളുടെ വർഗ്ഗീകരണം
ടാസ്മാനിയൻ മിഡ്ലാൻഡ്സ്. ഡ്രോണുകൾ 3 (1), 5.
Messina, G., Modica, G., 2020. കൃത്യമായ കൃഷിയിൽ UAV തെർമൽ ഇമേജറിയുടെ പ്രയോഗങ്ങൾ: അത്യാധുനികവും ഭാവി ഗവേഷണ വീക്ഷണവും. റിമോട്ട് സെൻസിംഗ് 12 (9), https://doi.org/10.3390/rs12091491.
Mishra, D., Luo, Z., Jiang, S., Papadopoulos, T., Dubey, R., 2017. ബിഗ് ഡാറ്റയെക്കുറിച്ചുള്ള ഒരു ഗ്രന്ഥസൂചിക പഠനം: ആശയങ്ങൾ, പ്രവണതകൾ, വെല്ലുവിളികൾ. ബിസിനസ് പ്രോസസ് മാനേജർ. ജെ. 23 (3),
XXX - 555.
Mochida, K., Saisho, D., Hirayama, T., 2015. ഫീൽഡ് സാഹചര്യങ്ങളിൽ ലഭിച്ച ലൈഫ് സൈക്കിൾ ഡാറ്റാസെറ്റുകൾ ഉപയോഗിച്ച് വിള മെച്ചപ്പെടുത്തൽ. ഫ്രണ്ട്. പ്ലാൻ്റ് സയൻസ്. 6 https://doi.org/10.3389/
fpls.2015.00740.
മൊഗിലി, യുഎംആർ, ദീപക്, ബിബിവിഎൽ, 2018. കൃത്യമായ കൃഷിയിൽ ഡ്രോൺ സംവിധാനങ്ങളുടെ പ്രയോഗത്തെക്കുറിച്ചുള്ള അവലോകനം. പ്രൊസീഡിയ കമ്പ്യൂട്ട്. ശാസ്ത്രം. 133, 502-509.
മൊഹരാന, എസ്., ദത്ത, എസ്., 2016. ഹൈപ്പർസ്പെക്ട്രൽ ഇമേജറിയിൽ നിന്ന് അരിയിലെ ക്ലോറോഫിൽ, നൈട്രജൻ ഉള്ളടക്കത്തിൻ്റെ സ്പേഷ്യൽ വേരിയബിലിറ്റി. ISPRS ജെ. ഫോട്ടോഗ്രാം. റിമോട്ട് സെൻസ് 122, 17–29.
മുവാങ്പ്രതുബ്, ജെ., ബൂന്നം, എൻ., കജോർങ്കസിറത്ത്, എസ്., ലെക്ബാംഗ്പോങ്, എൻ., വാനിച്സോമ്പാറ്റ്, എ.,
Nillaor, P., 2019. സ്മാർട്ട് ഫാമിനായുള്ള IoT, കാർഷിക ഡാറ്റ വിശകലനം. കമ്പ്യൂട്ട്. ഇലക്ട്രോൺ. അഗ്രിക്. 156, 467-474.
നാൻസെൻ, സി., എലിയറ്റ്, എൻ., 2016. കീടശാസ്ത്രത്തിലെ റിമോട്ട് സെൻസിംഗും പ്രതിഫലന പ്രൊഫൈലിങ്ങും. അന്നു. എൻ്റോമോൾ റവ. 61 (1), 139–158. https://doi.org/10.1146/annurev-ento010715-023834.
Navia, J., Mondragon, I., Patino, D., Colorado, J., 2016. കാർഷിക മേഖലയിലെ മൾട്ടിസ്പെക്ട്രൽ മാപ്പിംഗ്: ഒരു സ്വയംഭരണാധികാരമുള്ള ക്വാഡ്കോപ്റ്റർ UAV ഉപയോഗിച്ച് ഭൂപ്രദേശ മൊസൈക്ക്. Int. കോൺഫ്.
ആളില്ലാ എയർക്രാഫ്റ്റ് സിസ്റ്റം. (ICUAS) 2016, 1351–1358. https://doi.org/10.1109/ ICUAS.2016.7502606.
Nayyar, A., Nguyen, B.-L., Nguyen, NG, 2020. ദി ഇൻ്റർനെറ്റ് ഓഫ് ഡ്രോൺ തിംഗ്സ് (Iodt): സ്മാർട്ട് ഡ്രോണുകളുടെ ഭാവി വിഭാവനം. അഡ്വ. ഇൻ്റൽ. സിസ്റ്റർ. കമ്പ്യൂട്ട്. 1045, 563-580. https://doi.org/10.1007/978-981-15-0029-9_45.
Nebiker, S., Annen, A., Scherrer, M., Oesch, D., 2008. മൈക്രോ UAV-ക്കായുള്ള ഒരു ഭാരം കുറഞ്ഞ മൾട്ടിസ്പെക്ട്രൽ സെൻസർ - വളരെ ഉയർന്ന റെസല്യൂഷൻ എയർബോൺ റിമോട്ട് സെൻസിംഗിനുള്ള അവസരങ്ങൾ. Int. കമാനം. ഫോട്ടോഗ്രാം. റിമോട്ട് സെൻസ് സ്പാറ്റ്. Inf. ശാസ്ത്രം 37 (B1), 1193–1200.
നെഗാഷ്, എൽ., കിം, എച്ച്.-വൈ., ചോയ്, എച്ച്.-എൽ., 2019. കാർഷിക മേഖലയിൽ ഉയർന്നുവരുന്ന യുഎവി ആപ്ലിക്കേഷനുകൾ. ഇൻ: 2019 റോബോട്ട് ഇൻ്റലിജൻസ് ടെക്നോളജി സംബന്ധിച്ച 7-ാമത് അന്താരാഷ്ട്ര കോൺഫറൻസ് ഒപ്പം
ആപ്ലിക്കേഷനുകൾ (RiTA), പേജ്. 254–257. https://doi.org/10.1109/RITAPP.2019.8932853.
നെരൂർ, എസ്പി, റഷീദ്, എഎ, നടരാജൻ, വി., 2008. സ്ട്രാറ്റജിക് മാനേജ്മെൻ്റ് ഫീൽഡിൻ്റെ ബൗദ്ധിക ഘടന: ഒരു രചയിതാവ് കോ-സൈറ്റേഷൻ വിശകലനം. തന്ത്രം. മാനഗ്. ജെ. 29 (3),
XXX - 319.
Neupane, K., Baysal-Gurel, F., 2021. ആളില്ലാ ആകാശ വാഹനങ്ങൾ ഉപയോഗിച്ച് സസ്യ രോഗങ്ങളെ സ്വയമേവ തിരിച്ചറിയലും നിരീക്ഷണവും: ഒരു അവലോകനം. റിമോട്ട് സെൻസിംഗ് 13 (19), 3841. https://doi.org/10.3390/rs13193841.
Nex, F., Remondino, F., 2014. 3D മാപ്പിംഗ് ആപ്ലിക്കേഷനുകൾക്കുള്ള UAV: ഒരു അവലോകനം. ആപ്പ്. ജിയോമാറ്റിക്സ് 6 (1), 1-15. https://doi.org/10.1007/s12518-013-0120-x.
Niu, H., Hollenbeck, D., Zhao, T., Wang, D., Chen, Y., 2020. കൃത്യമായ കൃഷിയിൽ ചെറിയ UAV-കൾ ഉപയോഗിച്ചുള്ള എവാപോട്രാൻസ്പിരേഷൻ എസ്റ്റിമേഷൻ. സെൻസറുകൾ 20 (22), 6427. https://
doi.org/10.3390/s20226427.
ഒസാരെ, എഫ്., 1996. ബിബ്ലിയോമെട്രിക്സ്, സൈറ്റേഷൻ അനാലിസിസ്, കോ-സൈറ്റേഷൻ അനാലിസിസ്. എ റിവ്യൂ ഓഫ് ലിറ്ററേച്ചർ I 46 (3), 149–158. https://doi.org/10.1515/libr.1996.46.3.149.
P´ adua, L., Vanko, J., Hruˇska, J., Ad˜ ao, T., Sousa, JJ, Peres, E., Morais, R., 2017. അഗ്രോഫോറസ്ട്രിയിലെ UAS, സെൻസറുകൾ, ഡാറ്റ പ്രോസസ്സിംഗ്: പ്രായോഗിക പ്രയോഗങ്ങളെക്കുറിച്ചുള്ള ഒരു അവലോകനം. Int. ജെ. റിമോട്ട് സെൻസ് 38 (8–10), 2349–2391. https://doi.org/10.1080/01431161.2017.1297548.
പാണ്ഡേ, യുഎസ്, പ്രതിഹസ്റ്റ്, എകെ, ആര്യാൽ, ജെ., കയസ്ത, ആർബി, 2020. ധാന്യവിളകൾക്കുള്ള ഡ്രോൺ അടിസ്ഥാനമാക്കിയുള്ള ഡാറ്റാ സൊല്യൂഷനുകളെക്കുറിച്ചുള്ള ഒരു അവലോകനം. ഡ്രോണുകൾ 4 (3), 1–29. https://doi.org/10.3390/
ഡ്രോണുകൾ 4030041.
Parsaeian, M., Shahabi, M., Hassanpour, H., 2020. ഇമേജ് പ്രോസസ്സിംഗും കൃത്രിമ ന്യൂറൽ നെറ്റ്വർക്കും ഉപയോഗിച്ച് എള്ളിലെ എണ്ണയുടെയും പ്രോട്ടീനിൻ്റെയും അളവ് കണക്കാക്കുന്നു. ജാം. എണ്ണ
രസതന്ത്രജ്ഞരുടെ Soc. 97 (7), 691–702.
പെന, ˜ JM, Torres-S´anchez, J., de Castro, AI, Kelly, M., Lopez-Granados, ´ F., Suarez, O., ഒബ്ജക്റ്റ് അധിഷ്ഠിത വിശകലനം ഉപയോഗിച്ച് ആദ്യകാല ചോള പാടങ്ങളിൽ കള മാപ്പിംഗ് യുടെ
ആളില്ലാ വിമാനം (UAV) ചിത്രങ്ങൾ. PLoS ONE 8 (10), e77151.
P´erez-Ortiz, M., Pena, ˜ JM, Guti´errez, PA, Torres-S´ anchez, J., Herv´ as-Martínez, C.,
Lopez-Granados, ´ F., 2015. ആളില്ലാ ആകാശ വാഹനങ്ങളും ക്രോപ്പ് റോ ഡിറ്റക്ഷൻ രീതിയും ഉപയോഗിച്ച് സൂര്യകാന്തി വിളകളിൽ കള മാപ്പിംഗിനുള്ള ഒരു അർദ്ധ-മേൽനോട്ടത്തിലുള്ള സംവിധാനം. ആപ്പ്. സോഫ്റ്റ് കമ്പ്യൂട്ട്. ജെ. 37, 533-544. https://doi.org/10.1016/j.asoc.2015.08.027.
Pincheira, M., Vecchio, M., Giaffreda, R., Kanhere, SS, 2021. കൃത്യമായ കൃഷിയിൽ ബ്ലോക്ക്ചെയിൻ അധിഷ്ഠിത ജല മാനേജ്മെൻ്റ് സിസ്റ്റത്തിനുള്ള വിശ്വസനീയമായ ഡാറ്റാ സ്രോതസ്സുകളായി ചെലവ് കുറഞ്ഞ IoT ഉപകരണങ്ങൾ. കമ്പ്യൂട്ട്. ഇലക്ട്രോൺ. അഗ്രിക്. 180, 105889.
Popescu, D., Stoican, F., Stamatescu, G., Ichim, L., Dragana, C., 2020. കൃത്യമായ കൃഷിയിൽ ബുദ്ധിപരമായ നിരീക്ഷണത്തിനുള്ള വിപുലമായ UAV-WSN സിസ്റ്റം. സെൻസറുകൾ 20 (3), https://doi.org/10.3390/s20030817.
Pournader, M., Shi, Y., Seuring, S., Koh, SL, 2020. വിതരണ ശൃംഖലകൾ, ഗതാഗതം, ലോജിസ്റ്റിക്സ് എന്നിവയിലെ ബ്ലോക്ക്ചെയിൻ ആപ്ലിക്കേഷനുകൾ: സാഹിത്യത്തിൻ്റെ ഒരു ചിട്ടയായ അവലോകനം. Int. ജെ. പ്രൊഡ. Res. 58 (7), 2063–2081.
Primicerio, J., Di Gennaro, SF, Fiorillo, E., Genesio, L., Lugato, E., Matese, A., Vacari, FP, 2012. കൃത്യമായ കൃഷിക്കായി ഒരു ഫ്ലെക്സിബിൾ ആളില്ലാ വിമാനം.
കൃത്യമായി. അഗ്രിക്. 13 (4), 517–523. https://doi.org/10.1007/s11119-012-9257-6.
പ്രിച്ചാർഡ്, എ., 1969. സ്റ്റാറ്റിസ്റ്റിക്കൽ ഗ്രന്ഥസൂചിക അല്ലെങ്കിൽ ബിബ്ലിയോമെട്രിക്സ്. J. പ്രമാണം. 25 (4), 348–349.
Pudelko, R., Stuczynski, T., Borzecka-Walker, M., 2012. പരീക്ഷണാത്മക വയലുകളുടെയും വിളകളുടെയും മൂല്യനിർണ്ണയത്തിന് ആളില്ലാ വിമാനത്തിൻ്റെ (UAV) അനുയോജ്യത. കൃഷി 99 (4), 431–436.
പുരി, വി., നയ്യാർ, എ., രാജ, എൽ., 2017. അഗ്രികൾച്ചർ ഡ്രോണുകൾ: കൃത്യമായ കൃഷിയിൽ ഒരു ആധുനിക മുന്നേറ്റം. ജെ. സ്റ്റാറ്റിസ്. മാനഗ്. സിസ്റ്റർ. 20 (4), 507–518.
Radoglou-Grammatikis, P., Sarigiannidis, P., Lagkas, T., Moscholios, I., 2020. കൃത്യമായ കൃഷിക്കായുള്ള UAV ആപ്ലിക്കേഷനുകളുടെ ഒരു സമാഹാരം. കമ്പ്യൂട്ട്. നെറ്റ് 172,
107148 https://doi.org/10.1016/j.comnet.2020.107148.
രമേഷ്, കെവി, രാകേഷ്, വി., പ്രകാശ റാവു, ഇവിഎസ്, 2020. അഗ്രോണമിക് ഗവേഷണത്തിൽ ബിഗ് ഡാറ്റ അനലിറ്റിക്സിൻ്റെയും ആർട്ടിഫിഷ്യൽ ഇൻ്റലിജൻസിൻ്റെയും പ്രയോഗം. ഇന്ത്യൻ ജെ. അഗ്രോൺ. 65 (4), 383–395.
Raparelli, E., Bajocco, S., 2019. കാർഷിക, വനവൽക്കരണ പഠനങ്ങളിൽ ആളില്ലാ ആകാശ വാഹനങ്ങളുടെ ഉപയോഗത്തെക്കുറിച്ചുള്ള ഒരു ബിബ്ലിയോമെട്രിക് വിശകലനം. Int. ജെ. റിമോട്ട് സെൻസ്. 40 (24),
9070–9083. https://doi.org/10.1080/01431161.2019.1569793.
റാസ്മുസെൻ, ജെ., നീൽസൺ, ജെ., ഗാർസിയ-റൂയിസ്, എഫ്., ക്രിസ്റ്റൻസൻ, എസ്., സ്ട്രീബിഗ്, ജെസി, ലോട്ട്സ്, ബി., 2013.
കള ഗവേഷണത്തിൽ ചെറിയ ആളില്ലാ വിമാന സംവിധാനങ്ങളുടെ (UAS) സാധ്യതയുള്ള ഉപയോഗങ്ങൾ. കള റെസ്. 53 (4), 242–248.
Rasmussen, J., Ntakos, G., Nielsen, J., Svensgaard, J., Poulsen, RN, Christensen, S., ഘടിപ്പിച്ചിരിക്കുന്ന ഉപഭോക്തൃ-ഗ്രേഡ് ക്യാമറകളിൽ നിന്ന് ഉരുത്തിരിഞ്ഞ സസ്യ സൂചികകളാണ്
പരീക്ഷണ പ്ലോട്ടുകൾ വിലയിരുത്തുന്നതിന് യുഎവികൾ വേണ്ടത്ര വിശ്വസനീയമാണോ? യൂറോ. ജെ. അഗ്രോൺ. 74, 75-92. https://doi.org/10.1016/j.eja.2015.11.026.
Rejeb, A., Rejeb, K., Abdullahi, A., Zailani, S., Iranmanesh, M., Ghobakhloo, M., 2022. ഭക്ഷ്യ വിതരണ ശൃംഖലയിലെ ഡിജിറ്റലൈസേഷൻ: ഒരു ഗ്രന്ഥസൂചിക അവലോകനവും കീ-റൂട്ട് പ്രധാന പാതയും
വിശകലനം. സുസ്ഥിരത 14 (1), 83. https://doi.org/10.3390/su14010083.
Rejeb, A., Rejeb, K., Simske, SJ, Treiblmaier, H., 2021a. സപ്ലൈ ചെയിൻ മാനേജ്മെൻ്റിനും ലോജിസ്റ്റിക്സിനും വേണ്ടിയുള്ള ഡ്രോണുകൾ: ഒരു അവലോകനവും ഗവേഷണ അജണ്ടയും. Int. ജെ. ലോജിസ്റ്റ്. Res. ആപ്പ്.
1–24. https://doi.org/10.1080/13675567.2021.1981273.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021b. ലോജിസ്റ്റിക്സിലും സപ്ലൈ ചെയിൻ മാനേജ്മെൻ്റിലും ബ്ലോക്ക്ചെയിൻ സാങ്കേതികവിദ്യകൾ: ഒരു ബിബ്ലിയോമെട്രിക് അവലോകനം. ലോജിസ്റ്റിക്സ് 5 (4), 72.
https://doi.org/10.3390/logistics5040072.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021c. മാനുഷിക ഡ്രോണുകൾ: ഒരു അവലോകനവും ഗവേഷണ അജണ്ടയും. ഇൻ്റർനെറ്റ് ഓഫ് തിംഗ്സ് 16, 100434. https://doi.org/10.1016/j.
iot.2021.100434.
Rejeb, A., Treiblmaier, H., Rejeb, K., Zailani, S., 2021d. ആരോഗ്യ സംരക്ഷണത്തിലെ ബ്ലോക്ക്ചെയിൻ ഗവേഷണം: ഒരു ബിബ്ലിയോമെട്രിക് അവലോകനവും നിലവിലെ ഗവേഷണ പ്രവണതകളും. ഡാറ്റയുടെ ജെ., ഇൻഫ്. ഒപ്പം
മാനഗ്. 3 (2), 109–124.
Rejeb, A., Simske, S., Rejeb, K., Treiblmaier, H., Zailani, S., 2020. സപ്ലൈ ചെയിൻ മാനേജ്മെൻ്റിലും ലോജിസ്റ്റിക്സിലും ഇൻ്റർനെറ്റ് ഓഫ് തിംഗ്സ് ഗവേഷണം: ഒരു ബിബ്ലിയോമെട്രിക് വിശകലനം. ഇന്റർനെറ്റ്
കാര്യങ്ങൾ 12, 100318.
ReportLinker, 2021. ഗ്ലോബൽ ന്യൂസ്വയർ ന്യൂസ് റൂം പ്രകാരം ആഗോള കാർഷിക ഡ്രോണുകളുടെ വിപണി 15.2 ബില്യൺ യുഎസ് ഡോളറിലെത്തും. https://www.globenewswire.com/news-release/2021/08/10/2277986/0/en/Global-Agriculture-Drones-Market-to-Reach-US-15-2-Billion-by-the- വർഷം-2027.html.
Ribeiro-Gomes, K., Hernandez-L' opez, ´ D., Ortega, JF, Ballesteros, R., Poblete, T., Moreno, MA, 2017. തണുപ്പിക്കാത്ത തെർമൽ ക്യാമറ കാലിബ്രേഷനും ഒപ്റ്റിമൈസേഷനും
കാർഷിക മേഖലയിലെ UAV ആപ്ലിക്കേഷനുകൾക്കുള്ള ഫോട്ടോഗ്രാമെട്രി പ്രക്രിയ. സെൻസറുകൾ (സ്വിറ്റ്സർലൻഡ്) 17 (10). https://doi.org/10.3390/s17102173.
റിവേര, എംഎ, പിസാം, എ., 2015. ഹോസ്പിറ്റാലിറ്റി ഗവേഷണത്തിലെ പുരോഗതി: "റോഡ്നി ഡേഞ്ചർഫീൽഡ് മുതൽ അരേത ഫ്രാങ്ക്ലിൻ വരെ". Int. ജെ സമകാലികൻ. ആശുപത്രി. മാനഗ്. 27 (3),
362–378. https://doi.org/10.1108/IJCHM-03-2014-0146.
റോൾഡൻ, ´ JJ, Joossen, G., Sanz, D., Del Cerro, J., Barrientos, A., 2015. ഹരിതഗൃഹങ്ങളിലെ പരിസ്ഥിതി വ്യതിയാനങ്ങൾ അളക്കുന്നതിനുള്ള മിനി-UAV അടിസ്ഥാനമാക്കിയുള്ള സെൻസറി സിസ്റ്റം. സെൻസറുകൾ 15 (2), 3334–3350. https://doi.org/10.3390/s150203334.
Rozenberg, G., Kent, R., Blank, L., 2021. വാണിജ്യ ഉള്ളി പാടങ്ങളിലെ അവസാന സീസണിലെ കള സ്പേഷ്യൽ വിതരണ പാറ്റേണുകൾ കണ്ടെത്തുന്നതിനും വിശകലനം ചെയ്യുന്നതിനും ഉപഭോക്തൃ-ഗ്രേഡ് UAV ഉപയോഗിക്കുന്നു. കൃത്യമായി. അഗ്രിക്. 22 (4), 1317–1332. https://doi.org/10.1007/s11119-021-09786-y.
സാരി, എച്ച്., പെല്ലിക്ക, ഐ., പെസോണൻ, എൽ., ടുവോമിനൻ, എസ്., ഹെയ്ക്കില, ¨ ജെ., ഹോംലണ്ട്, സി., മക്കിനെൻ, ¨ ജെ., ഓജാല, കെ., ആൻ്റില, ടി., 2011. ആളില്ല വനം, കാർഷിക ആവശ്യങ്ങൾക്കായി ഏരിയൽ വെഹിക്കിൾ (UAV) പ്രവർത്തിപ്പിക്കുന്ന സ്പെക്ട്രൽ ക്യാമറ സിസ്റ്റം. തുടരുക. SPIE - Int. Soc. തിരഞ്ഞെടുക്കൂ. എൻജിനീയർ. 8174 https://doi.org/10.1117/12.897585.
Sah, B., Gupta, R., Bani-Hani, D., 2021. ഡ്രോൺ ലോജിസ്റ്റിക്സ് നടപ്പിലാക്കുന്നതിനുള്ള തടസ്സങ്ങളുടെ വിശകലനം. Int. ജെ. ലോജിസ്റ്റ്. Res. ആപ്പ്. 24 (6), 531–550. https://doi.org/10.1080/
13675567.2020.1782862.
സാഹ, എകെ, സാഹ, ജെ., റേ, ആർ., സിർകാർ, എസ്., ദത്ത, എസ്., ചട്ടോപാധ്യായ, എസ്പി, & സാഹ, എച്ച്എൻ, ഐഒടി അടിസ്ഥാനമാക്കിയുള്ള ഡ്രോൺ കാർഷിക മേഖലയിലെ വിളകളുടെ ഗുണനിലവാരം മെച്ചപ്പെടുത്തുന്നു. SH ൽ
എൻ. ചക്രബർത്തി എസ്. (എഡ്.), 2018 IEEE എട്ടാം വാർഷിക കമ്പ്യൂട്ടിംഗ് ആൻഡ് കമ്മ്യൂണിക്കേഷൻ വർക്ക്ഷോപ്പും കോൺഫറൻസും, CCWC 8 (വാല്യം. 2018-ജനുവരി, പേജ്. 2018–612). ഇൻസ്റ്റിറ്റ്യൂട്ട്
ഓഫ് ഇലക്ട്രിക്കൽ ആൻഡ് ഇലക്ട്രോണിക്സ് എഞ്ചിനീയേഴ്സ് ഇൻക്. doi: 10.1109/CCWC.2018.8301662.
സായ് വിനീത്, കെവി, വര പ്രസാദ്, വൈആർ, ദുബെ, എസ്ആർ, വെങ്കിട്ടരാമൻ, എച്ച്., 2019. എൽഇഡികോം: കൃത്യമായ കൃഷിക്കായുള്ള പുതിയതും കാര്യക്ഷമവുമായ എൽഇഡി ആശയവിനിമയം. IEEE കോൺഫ്. വിവരം. കമ്യൂൺ ടെക്നോൾ. 2019, 1–5. https://doi.org/10.1109/CICT48419.2019.9066177.
സലാമി, ഇ., ബരാഡോ, സി., പാസ്റ്റർ, ഇ., 2014. UAV ഫ്ലൈറ്റ് പരീക്ഷണങ്ങൾ സസ്യപ്രദേശങ്ങളുടെ വിദൂര സംവേദനത്തിന് പ്രയോഗിച്ചു. റിമോട്ട് സെൻസിംഗ് 6 (11), 11051–11081. https://doi.org/10.3390/rs61111051.
ശങ്കരൻ, എസ്., ഖോട്ട്, എൽആർ, എസ്പിനോസ, സിസെഡ്, ജറോൽമസ്ജെദ്, എസ്., സത്തുവള്ളി, വിആർ, വണ്ടേമാർക്ക്, ജിജെ, മിക്ലാസ്, പിഎൻ, കാർട്ടർ, എഎച്ച്, പമ്പ്രി, എംഒ, നോൾസ്, എൻആർഎൻ, പാവക്, എംജെ, 2015.
റോ ആൻഡ് ഫീൽഡ് ക്രോപ്പ് ഫിനോടൈപ്പിംഗിനുള്ള താഴ്ന്ന-ഉയരം, ഉയർന്ന റെസല്യൂഷൻ ഏരിയൽ ഇമേജിംഗ് സംവിധാനങ്ങൾ: ഒരു അവലോകനം. യൂറോ. ജെ. അഗ്രോൺ. 70, 112-123. https://doi.org/10.1016/j.
eja.2015.07.004.
Santesteban, LG, Di Gennaro, SF, Herrero-Langreo, A., Miranda, C., Royo, JB, Matese, A., 2017. ഉയർന്ന റെസല്യൂഷൻ UAV അടിസ്ഥാനമാക്കിയുള്ള തെർമൽ ഇമേജിംഗ്
ഒരു മുന്തിരിത്തോട്ടത്തിനുള്ളിലെ സസ്യജലത്തിൻ്റെ തൽക്ഷണവും കാലാനുസൃതവുമായ വ്യതിയാനം. അഗ്രിക്. വാട്ടർ മാനഗ്. 183, 49-59. https://doi.org/10.1016/j.agwat.2016.08.026.
സാർലി, CC, Dubinsky, EK, Holmes, KL, 2010. ഉദ്ധരണി വിശകലനത്തിനപ്പുറം: ഗവേഷണ സ്വാധീനത്തിൻ്റെ വിലയിരുത്തലിനുള്ള ഒരു മാതൃക. ജെ. മെഡ്. ലൈബ്രറി അസി. : ജെഎംഎൽഎ 98 (1), 17–23. https://doi.org/10.3163/1536-5050.98.1.008.
Schaepman, ME, Ustin, SL, Plaza, AJ, Painter, TH, Verrelst, J., Liang, S., 2009. എർത്ത് സിസ്റ്റം സയൻസുമായി ബന്ധപ്പെട്ട ഇമേജിംഗ് സ്പെക്ട്രോസ്കോപ്പി-ഒരു വിലയിരുത്തൽ. റിമോട്ട് സെൻസ് പരിസ്ഥിതി. 113, S123-S137.
Schirrmann, M., Giebel, A., Gleiniger, F., Pflanz, M., Lentschke, J., Dammer, K.-H., 2016. കുറഞ്ഞ വിലയുള്ള UAV ഉപയോഗിച്ച് ശീതകാല ഗോതമ്പ് വിളകളുടെ അഗ്രോണമിക് പാരാമീറ്ററുകൾ നിരീക്ഷിക്കുന്നു
ഇമേജറി. റിമോട്ട് സെൻസിംഗ് 8 (9). https://doi.org/10.3390/rs8090706.
Schmale III, DG, Dingus, BR, Reinholtz, C., 2008. മുകളിലുള്ള കൃത്യമായ എയറോബയോളജിക്കൽ സാമ്പിളിനായി സ്വയംഭരണമുള്ള ആളില്ലാ ആകാശ വാഹനത്തിൻ്റെ വികസനവും പ്രയോഗവും
കാർഷിക വയലുകൾ. ജെ. ഫീൽഡ് റോബ്. 25 (3), 133-147. https://doi.org/10.1002/rob.20232.
ഷാഡ്രിൻ, ഡി., മെൻഷിക്കോവ്, എ., സോമോവ്, എ., ബോർൺമാൻ, ജി., ഹൗസ്ലേജ്, ജെ., ഫെഡോറോവ്, എം.,
ആർട്ടിഫിഷ്യൽ ഇൻ്റലിജൻസ് ഉപയോഗിച്ച് എംബഡഡ് സെൻസിങ്ങിലൂടെ കൃത്യമായ കൃഷി സാധ്യമാക്കുന്നു. IEEE ട്രാൻസ്. ഇൻസ്ട്രം. മീസ്. 69 (7), 4103–4113.
ഷാഖത്രേ, എച്ച്., സവൽമേ, എഎച്ച്, അൽ-ഫുഖഹ, എ., ദൗ, ഇസഡ്, അൽമൈത, ഇ., ഖലീൽ, ഐ.,
Othman, NS, Khreishah, A., Guizani, M., 2019. ആളില്ലാ ആകാശ വാഹനങ്ങൾ (UAVs): സിവിൽ ആപ്ലിക്കേഷനുകളെയും പ്രധാന ഗവേഷണ വെല്ലുവിളികളെയും കുറിച്ചുള്ള ഒരു സർവേ. IEEE ആക്സസ് 7,
48572–48634. https://doi.org/10.1109/ACCESS.2019.2909530.
Shakoor, N., Northrup, D., Murray, S., Mockler, TC, 2019. ബിഗ് ഡാറ്റ ഡ്രൈവ് അഗ്രികൾച്ചർ: പ്ലാൻ്റ് ബ്രീഡിംഗ്, ജീനോമിക്സ്, റിമോട്ട് സെൻസിംഗിൻ്റെ ഉപയോഗം എന്നിവയിലെ ബിഗ് ഡാറ്റ അനലിറ്റിക്സ്
വിള ഉൽപാദനക്ഷമത വർദ്ധിപ്പിക്കുന്നതിനുള്ള സാങ്കേതികവിദ്യകൾ. പ്ലാൻ്റ് ഫിനോം ജെ. 2 (1), 1–8.
ശർമ്മ, BK, ചന്ദ്ര, ജി., മിശ്ര, VP, 2019. ഫോറൻസിക് അന്വേഷണങ്ങളിൽ UAV, AI എന്നിവയുടെ താരതമ്യ വിശകലനവും സ്വാധീനവും. ഇൻ: നടപടിക്രമങ്ങൾ - 2019 അമിറ്റി ഇൻ്റർനാഷണൽ
ആർട്ടിഫിഷ്യൽ ഇൻ്റലിജൻസ് കോൺഫറൻസ്. https://doi.org/10.1109/AICAI.2019.8701407.
ശർമ്മ, ആർ., ശിശോദിയ, എ., ഗുണശേഖരൻ, എ., മിനി, എച്ച്., മുനിം, ZH, 2022. സപ്ലൈ ചെയിൻ മാനേജ്മെൻ്റിൽ ആർട്ടിഫിഷ്യൽ ഇൻ്റലിജൻസിൻ്റെ പങ്ക്: പ്രദേശത്തിൻ്റെ മാപ്പിംഗ്. Int. ജെ.
പ്രൊഡ്. Res. 1-24. https://doi.org/10.1080/00207543.2022.2029611.
ഷി, വൈ, തോമസ്സൺ, ജെഎ, മുറെ, എസ്സി, പഗ്, എൻഎ, റൂണി, ഡബ്ല്യുഎൽ, ഷാഫിയാൻ, എസ്., രാജൻ, എൻ., റൗസ്, ജി., മോർഗൻ, സിഎൽഎസ്, നീലി, എച്ച്എൽ, റാണ, എ., ബാഗവതിയണ്ണൻ , എം.വി.
ഹെൻറിക്സൺ, ജെ., ബൗഡൻ, ഇ., വലസെക്, ജെ., ഓൾസെൻഹോളർ, ജെ., ബിഷപ്പ്, എംപി, ഷെറിഡൻ, ആർ., പുട്ട്മാൻ, ഇബി, പോപ്പസ്ക്യൂ, എസ്., ബർക്സ്, ടി., കോപ്പ്, ഡി., ഇബ്രാഹിം എ., മക്കുച്ചൻ, BF,
Baltensperger, DD, Avant, RV, Vidrine, M., Yang, C., Zhang, J., 2016. ഹൈ-ത്രൂപുട്ട് ഫിനോടൈപ്പിംഗിനും കാർഷിക ഗവേഷണത്തിനുമുള്ള ആളില്ലാ ആകാശ വാഹനങ്ങൾ. പ്ലോസ് വൺ
11 (7), e0159781.
Shuai, G., Martinez-Feria, RA, Zhang, J., Li, S., Price, R., Basso, B., 2019. ആളില്ലാ ഏരിയൽ ഉപയോഗിച്ച് വിളവ്-സ്ഥിരത മേഖലകളിലുടനീളം ചോളം സ്റ്റാൻഡ് വൈവിധ്യം പിടിച്ചെടുക്കൽ
വാഹനങ്ങൾ (UAV). സെൻസറുകൾ 19 (20), 4446. https://doi.org/10.3390/s19204446.
സ്മോൾ, എച്ച്., 1973. ശാസ്ത്ര സാഹിത്യത്തിലെ കോ-അവലംബം: രണ്ട് പ്രമാണങ്ങൾ തമ്മിലുള്ള ബന്ധത്തിൻ്റെ ഒരു പുതിയ അളവ്. ജാം. Soc. വിവരം. ശാസ്ത്രം. 24 (4), 265–269.
സ്മോൾ, എച്ച്., റോർവിഗ്, എംഇ, ലുനിൻ, എൽഎഫ്, 1999. ഉദ്ധരണി മാപ്പിംഗ് വഴി ശാസ്ത്രം ദൃശ്യവൽക്കരിക്കുന്നു. ജാം. Soc. വിവരം. ശാസ്ത്രം. 50 (9), 799–813.
Soares, VHA, Ponti, MA, Gonçalves, RA, Campello, RJGB, 2021. വന്യമായ മേച്ചിൽപ്പുറങ്ങളിൽ ജിയോലൊക്കേറ്റഡ് ഏരിയൽ ചിത്രങ്ങളുള്ള കാട്ടിൽ കന്നുകാലികളെ എണ്ണുന്നു. കമ്പ്യൂട്ട്. ഇലക്ട്രോൺ. അഗ്രിക്. 189, 106354 https://doi.org/10.1016/j.compag.2021.106354.
ശ്രീവാസ്തവ, കെ., പാണ്ഡെ, പിസി, ശർമ്മ, ജെകെ, 2020. യുഎവികൾ ഉപയോഗിച്ച് കൃത്യമായ കൃഷിയുടെ ആപ്ലിക്കേഷനുകളിൽ റൂട്ട് ഒപ്റ്റിമൈസേഷനുള്ള ഒരു സമീപനം. ഡ്രോണുകൾ 4 (3), 58. https://doi.org/ 10.3390/drones4030058.
സ്റ്റാഫോർഡ്, JV, 2000. 21-ാം നൂറ്റാണ്ടിൽ കൃത്യമായ കൃഷി നടപ്പിലാക്കുന്നു. ജെ. അഗ്രിക്. എൻജിനീയർ. Res. 76 (3), 267–275.
Su, J., Coombes, M., Liu, C., Guo, L., Chen, W.-H., 2018. ആളില്ലാ ആകാശ വാഹനം ഉപയോഗിച്ച് റിമോട്ട് സെൻസിംഗ് ഇമേജറി ഉപയോഗിച്ച് ഗോതമ്പ് വരൾച്ച വിലയിരുത്തൽ. 2018-ൽ 37-ാമത് ചൈനീസ് കൺട്രോൾ കോൺഫറൻസ് (CCC).
Su, J., Liu, C., Coombes, M., Hu, X., Wang, C., Xu, X., Li, Q., Guo, L., Chen, W.-H., 2018. മൾട്ടിസ്പെക്ട്രൽ UAV ഏരിയൽ ഇമേജറിയിൽ നിന്ന് പഠിച്ചുകൊണ്ട് ഗോതമ്പ് മഞ്ഞ തുരുമ്പ് നിരീക്ഷണം.
കമ്പ്യൂട്ട്. ഇലക്ട്രോൺ. അഗ്രിക്. 155, 157-166. https://doi.org/10.1016/j. compag.2018.10.017.
Su, Y., Wang, X., 2021. ബിഗ് ഡാറ്റ ഉപയോഗിച്ച് സ്മാർട്ട് കൃഷി നിർമ്മിക്കുന്ന പ്രക്രിയയിൽ കാർഷിക സാമ്പത്തിക മാനേജ്മെൻ്റിൻ്റെ നവീകരണം. സുസ്ഥിര കമ്പ്യൂട്ട്. Inf. സിസ്റ്റർ. 31, 100579 https://doi.org/10.1016/j.suscom.2021.100579.
സള്ളിവൻ, DG, Fulton, JP, Shaw, JN, Bland, GL, 2007. ഒരു പരുത്തി മേലാപ്പിലെ ജല സമ്മർദ്ദം കണ്ടെത്തുന്നതിന് ആളില്ലാ തെർമൽ ഇൻഫ്രാറെഡ് ഏരിയൽ സിസ്റ്റത്തിൻ്റെ സംവേദനക്ഷമത വിലയിരുത്തുന്നു. ട്രാൻസ്. ASABE 50 (6), 1955–1962.
Sumesh, KC, Ninsawat, S., Som-ard, J., 2021. ആളില്ലാ ആകാശ വാഹനം ഉപയോഗിച്ച് കരിമ്പിൻ്റെ വിളവ് കണക്കാക്കുന്നതിനുള്ള RGB-അടിസ്ഥാന സസ്യ സൂചിക, വിള ഉപരിതല മാതൃക, ഒബ്ജക്റ്റ് അധിഷ്ഠിത ഇമേജ് വിശകലന സമീപനം എന്നിവയുടെ സംയോജനം. കമ്പ്യൂട്ട്. ഇലക്ട്രോൺ. അഗ്രിക്. 180, 105903 https://doi.org/10.1016/j.compag.2020.105903.
Suomalainen, J., Anders, N., Iqbal, S., Franke, J., Wenting, P., Bartholomeus, H., Becker, R., Kooistra, L., 2013. ഒരു ലൈറ്റ് വെയ്റ്റ് ഹൈപ്പർസ്പെക്ട്രൽ മാപ്പിംഗ് സിസ്റ്റം
ആളില്ലാ ആകാശ വാഹനങ്ങൾ-ആദ്യ ഫലങ്ങൾ. ഇൻ: 2013 ഹൈപ്പർസ്പെക്ട്രൽ ഇമേജും സിഗ്നൽ പ്രോസസ്സിംഗും സംബന്ധിച്ച അഞ്ചാമത്തെ വർക്ക്ഷോപ്പ്: റിമോട്ട് സെൻസിംഗിലെ പരിണാമം (WHISPERS), പേജ്. 5–1. https://doi.org/4/WHISPERS.10.1109.
സുവോമലൈനൻ, ജെ., ആൻഡേഴ്സ്, എൻ., ഇഖ്ബാൽ, എസ്., റോറിങ്ക്, ജി., ഫ്രാങ്കെ, ജെ., വെൻ്റിങ്, പി., ഹന്നിഗർ, ഡി., ബർത്തലോമിയസ്, എച്ച്., ബെക്കർ, ആർ., കൂയിസ്ട്ര, എൽ., 2014. ഒരു കനംകുറഞ്ഞ ഹൈപ്പർസ്പെക്ട്രൽ
ആളില്ലാ വിമാനങ്ങൾക്കായുള്ള മാപ്പിംഗ് സംവിധാനവും ഫോട്ടോഗ്രാമെട്രിക് പ്രോസസ്സിംഗ് ശൃംഖലയും. റിമോട്ട് സെൻസിംഗ് 6 (11), 11013–11030. https://doi.org/10.3390/
rs61111013.
Syeda, IH, Alam, MM, Illahi, U., Su'ud, MM, 2021. കാർഷിക മേഖലയിലെ ഇമേജ് പ്രോസസ്സിംഗ്, UAV, AI എന്നിവ ഉപയോഗിച്ച് മുൻകൂർ നിയന്ത്രണ തന്ത്രങ്ങൾ: ഒരു അവലോകനം. വേൾഡ് ജെ. 18 (4),
579–589. https://doi.org/10.1108/WJE-09-2020-0459.
Tahai, A., Rigsby, JT, 1998. അക്കൗണ്ടിംഗിലെ ജേണൽ സ്വാധീനം അന്വേഷിക്കാൻ ഉദ്ധരണികൾ ഉപയോഗിച്ച് വിവര പ്രോസസ്സിംഗ്. Inf. പ്രക്രിയ. കൈകാര്യം ചെയ്യുക. 34 (2-3), 341-359.
Tang, Y., Dananjayan, S., Hou, C., Guo, Q., Luo, S., He, Y., 2021. 5G നെറ്റ്വർക്കിനെയും കാർഷികമേഖലയിലെ അതിൻ്റെ സ്വാധീനത്തെയും കുറിച്ചുള്ള ഒരു സർവേ: വെല്ലുവിളികളും അവസരങ്ങളും. കമ്പ്യൂട്ട്.
ഇലക്ട്രോൺ. അഗ്രിക്. 180, 105895 https://doi.org/10.1016/j.compag.2020.105895.
Tantalaki, N., Souravlas, S., Roumeliotis, M., 2019. കൃത്യമായ കൃഷിയിൽ ഡാറ്റാധിഷ്ഠിത തീരുമാനമെടുക്കൽ: കാർഷിക സംവിധാനങ്ങളിലെ വലിയ ഡാറ്റയുടെ ഉയർച്ച. ജെ. അഗ്രിക്. ഭക്ഷണ വിവരം.
20 (4), 344–380.
Tao, H., Feng, H., Xu, L., Miao, M., Yang, G., Yang, X., Fan, L., 2020. UAV ഉപയോഗിച്ച് ശീതകാല ഗോതമ്പിൻ്റെ വിളവും ചെടികളുടെ ഉയരവും കണക്കാക്കൽ- അടിസ്ഥാനമാക്കിയുള്ള ഹൈപ്പർസ്പെക്ട്രൽ ചിത്രങ്ങൾ.
സെൻസറുകൾ 20 (4), 1231.
Techy, L., Schmale III, DG, Woolsey, CA, 2010. രണ്ട് ഓട്ടോണമസ് ആളില്ലാ ആകാശ വാഹനങ്ങൾ ഉപയോഗിച്ച് താഴ്ന്ന അന്തരീക്ഷത്തിൽ ഒരു സസ്യ രോഗകാരിയുടെ ഏകോപിത എയറോബയോളജിക്കൽ സാമ്പിൾ. ജെ. ഫീൽഡ് റോബ്. 27 (3), 335–343. https://doi.org/10.1002/rob.20335.
Tetila, EC, Machado, BB, Astolfi, G., Belete, NAdS, Amorim, WP, Roel, AR, Pistori, H., 2020. ആഴത്തിലുള്ള പഠനം ഉപയോഗിച്ച് സോയാബീൻ കീടങ്ങളെ കണ്ടെത്തലും വർഗ്ഗീകരണവും
UAV ചിത്രങ്ങൾക്കൊപ്പം. കമ്പ്യൂട്ട്. ഇലക്ട്രോൺ. അഗ്രിക്. 179, 105836.
Thamm, H.-P., Menz, G., Becker, M., Kuria, DN, Misana, S., Kohn, D., 2013. The Use of Uas for Assessing Agricultural Systems in AN Tanzania in the- സുസ്ഥിര കൃഷിക്ക് വേണ്ടിയുള്ള വെറ്റ് സീസണും ടെറ-സാർ എക്സ് ഡാറ്റയ്ക്ക് അടിസ്ഥാന സത്യവും നൽകുന്നു. ഇൻ: ISPRS - ഇൻ്റർനാഷണൽ ആർക്കൈവ്സ് ഓഫ് ഫോട്ടോഗ്രാമെട്രി, റിമോട്ട് സെൻസിംഗ് ആൻഡ് സ്പേഷ്യൽ ഇൻഫർമേഷൻ സയൻസസ്, പേജ്. 401–406. https://doi.org/10.5194/isprsarchivesXL-1-W2-401-2013.
തെൽവാൾ, എം., 2008. ബിബ്ലിയോമെട്രിക്സ് മുതൽ വെബ്മെട്രിക്സ് വരെ. ജെ. വിവരം. ശാസ്ത്രം. 34 (4), 605–621.
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Pena, ˜ JM, 2015. UAV ചിത്രങ്ങളിലെ ഒപ്റ്റിമൽ ത്രെഷോൾഡിംഗിനായുള്ള ഒരു ഓട്ടോമാറ്റിക് ഒബ്ജക്റ്റ് അധിഷ്ഠിത രീതി: സസ്യവിളകളിലെ സസ്യങ്ങൾ കണ്ടെത്തുന്നതിനുള്ള ആപ്ലിക്കേഷൻ. കമ്പ്യൂട്ട്. ഇലക്ട്രോൺ. അഗ്രിക്. 114, 43-52. https://doi.org/10.1016/j.compag.2015.03.019.
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Serrano, N., Arquero, O., Pena, ˜ JM, Hassan, QK, 2015. കാർഷിക-വൃക്ഷത്തോട്ടങ്ങളുടെ ഹൈ-ത്രൂപുട്ട് 3-D നിരീക്ഷണം ആളില്ലാ ഏരിയൽ വെഹിക്കിൾ (UAV) സാങ്കേതികവിദ്യ. PLoS ONE 10 (6), e0130479.
Torres-Sanchez, ´ J., Pena, ˜ JM, de Castro, AI, Lopez-Granados, F., 2014. UAV-യിൽ നിന്നുള്ള ചിത്രങ്ങൾ ഉപയോഗിച്ച് പ്രാരംഭ-സീസൺ ഗോതമ്പ് പാടങ്ങളിലെ സസ്യങ്ങളുടെ അംശത്തിൻ്റെ മൾട്ടി-ടെമ്പറൽ മാപ്പിംഗ്. കമ്പ്യൂട്ട്. ഇലക്ട്രോൺ. അഗ്രിക്. 103, 104-113. https://doi.org/10.1016/j. compag.2014.02.009.
Tsouros, DC, Bibi, S., Sarigiannidis, PG, 2019. കൃത്യമായ കൃഷിക്കായി UAV അടിസ്ഥാനമാക്കിയുള്ള ആപ്ലിക്കേഷനുകളെക്കുറിച്ചുള്ള ഒരു അവലോകനം. വിവരങ്ങൾ (സ്വിറ്റ്സർലൻഡ്) 10 (11). https://doi.org/10.3390/info10110349.
Tu, Y.-H., Phinn, S., Johansen, K., Robson, A., Wu, D., 2020. ഹോർട്ടികൾച്ചറൽ ട്രീ ക്രോപ്പ് ഘടന അളക്കുന്നതിനുള്ള ഡ്രോൺ ഫ്ലൈറ്റ് പ്ലാനിംഗ് ഒപ്റ്റിമൈസ് ചെയ്യുന്നു. ISPRS J. ഫോട്ടോഗ്രാം.
റിമോട്ട് സെൻസ് 160, 83–96. https://doi.org/10.1016/j.isprsjprs.2019.12.006
Tzounis, A., Katsoulas, N., Bartzanas, T., Kittas, C., 2017. ഇൻ്റർനെറ്റ് ഓഫ് തിംഗ്സ് ഇൻ കൃഷി, സമീപകാല മുന്നേറ്റങ്ങളും ഭാവിയിലെ വെല്ലുവിളികളും. ബയോസിസ്റ്റ്. എൻജിനീയർ. 164, 31-48.
https://doi.org/10.1016/j.biosystemseng.2017.09.007.
ഉദ്ദീൻ, എ., സിംഗ്, വി.കെ, പിൻ്റോ, ഡി., ഓൾമോസ്, ഐ., 2015. മെക്സിക്കോയിലെ കമ്പ്യൂട്ടർ സയൻസ് ഗവേഷണത്തിൻ്റെ സയന്തോമെട്രിക് മാപ്പിംഗ്. സയൻറോമെട്രിക്സ് 105 (1), 97–114.
UN., 2019. ലോക ജനസംഖ്യാ സാധ്യതകൾ 2019. https://population.un.org/wpp/ (15/04/2022-ന് ആക്സസ് ചെയ്തത്).
Uto, K., Seki, H., Saito, G., Kosugi, Y., 2013. UAV മൗണ്ടഡ് മിനിയേച്ചർ ഹൈപ്പർസ്പെക്ട്രൽ സെൻസർ സിസ്റ്റം വഴി നെൽപ്പാടങ്ങളുടെ സ്വഭാവം. ഐഇഇഇ ജെ. സെൽ. മുകളിൽ. ആപ്പ്. എർത്ത് ഒബ്സ്.
റിമോട്ട് സെൻസ് 6 (2), 851–860. https://doi.org/10.1109/JSTARS.2013.2250921. van der Merwe, D., Burchfield, DR, Witt, TD, Price, KP, Sharda, A., 2020. Drones in
കൃഷി. അഡ്വ. അഗ്രോൺ. 162, 1–30.
വേലുസാമി, പി., രാജേന്ദ്രൻ, എസ്., മഹേന്ദ്രൻ, ആർ.കെ., നസീർ, എസ്., ഷഫീഖ്, എം., ചോയി, ജെ.-ജി., 2022.
കൃത്യമായ കൃഷിയിൽ ആളില്ലാ ആകാശ വാഹനങ്ങൾ (UAV): ആപ്ലിക്കേഷനുകളും വെല്ലുവിളികളും. ഊർജ്ജങ്ങൾ 15 (1), 217. https://doi.org/10.3390/en15010217.
Ventura, D., Bonifazi, A., Gravina, MF, Belluscio, A., Ardizzone, G., 2018. ആളില്ലാ ഏരിയൽ ഉപയോഗിച്ച് പാരിസ്ഥിതികമായി സെൻസിറ്റീവ് സമുദ്ര ആവാസ വ്യവസ്ഥകളുടെ മാപ്പിംഗും വർഗ്ഗീകരണവും
വെഹിക്കിൾ (UAV) ഇമേജറിയും ഒബ്ജക്റ്റ്-ബേസ്ഡ് ഇമേജ് അനാലിസിസും (OBIA). റിമോട്ട് സെൻസിംഗ് 10 (9), 1331. https://doi.org/10.3390/rs10091331.
Verger, A., Vigneau, N., Chéron, C., Gilliot, J.-M., Comar, A., Baret, F., 2014. ഗോതമ്പ്, റാപ്സീഡ് വിളകൾ എന്നിവയിൽ നിന്നുള്ള ആളില്ലാ ആകാശ സംവിധാനത്തിൽ നിന്നുള്ള ഗ്രീൻ ഏരിയ സൂചിക . റിമോട്ട് സെൻസ് പരിസ്ഥിതി. 152, 654-664. https://doi.org/10.1016/j.rse.2014.06.006.
Von Bueren, SK, Burkart, A., Hueni, A., Rascher, U., Tuohy, MP, Yule, IJ, 2015. പുൽമേടുകളിൽ നാല് ഒപ്റ്റിക്കൽ UAV അടിസ്ഥാനമാക്കിയുള്ള സെൻസറുകൾ വിന്യസിക്കുന്നു: വെല്ലുവിളികളും
പരിമിതികൾ. ബയോജിയോസയൻസസ് 12 (1), 163–175. https://doi.org/10.5194/bg-12-163-2015.
Vuran, MC, Salam, A., Wong, R., Irmak, S., 2018. കൃത്യമായ കൃഷിയിൽ ഭൂഗർഭ വസ്തുക്കളുടെ ഇൻ്റർനെറ്റ്: വാസ്തുവിദ്യയും സാങ്കേതിക വശങ്ങളും. അഡ് ഹോക്ക് നെറ്റ്. 81,
160-173. https://doi.org/10.1016/j.adhoc.2018.07.017.
Wamba, SF, Queiroz, MM, 2021. ഡിജിറ്റൽ ആരോഗ്യത്തിനുള്ള ഒരു രഹസ്യ ഘടകമെന്ന നിലയിൽ ഉത്തരവാദിത്തമുള്ള ആർട്ടിഫിഷ്യൽ ഇൻ്റലിജൻസ്: ബിബ്ലിയോമെട്രിക് വിശകലനം, സ്ഥിതിവിവരക്കണക്കുകൾ, ഗവേഷണ ദിശകൾ.
വിവരം. സിസ്റ്റർ. ഫ്രണ്ട്. 1–16.
വാങ്, എൽ., ഷാങ്, ജി., വാങ്, ഇസഡ്, ലിയു, ജെ., ഷാങ്, ജെ., ലിയാങ്, എൽ., 2019. വിള വളർച്ചാ നിരീക്ഷണത്തിലെ വിദൂര സെൻസിംഗ് ഗവേഷണ പ്രവണതയുടെ ബിബ്ലിയോമെട്രിക് വിശകലനം: ചൈനയിലെ ഒരു കേസ് പഠനം. റിമോട്ട് സെൻസിംഗ് 11 (7). https://doi.org/10.3390/rs11070809.
വൈറ്റ്, എച്ച്ഡി, ഗ്രിഫിത്ത്, ബിസി, 1981. രചയിതാവ് കോസിറ്റേഷൻ: ബൗദ്ധിക ഘടനയുടെ ഒരു സാഹിത്യ അളവ്. ജാം. Soc. വിവരം. ശാസ്ത്രം. 32 (3), 163-171.
Xiang, H., Tian, L., 2011. ഒരു ഓട്ടോണമസ് അൺമാൻഡ് ഏരിയൽ വെഹിക്കിൾ (UAV) അടിസ്ഥാനമാക്കിയുള്ള കുറഞ്ഞ ചെലവിൽ കാർഷിക റിമോട്ട് സെൻസിംഗ് സിസ്റ്റത്തിൻ്റെ വികസനം. ബയോസിസ്റ്റ്. എൻജിനീയർ. 108 (2), 174-190. https://doi.org/10.1016/j.biosystemseng.2010.11.010.
Xie, C., Yang, C., 2020. UAV അടിസ്ഥാനമാക്കിയുള്ള സെൻസറുകൾ ഉപയോഗിച്ച് പ്ലാൻ്റ് ഹൈ-ത്രൂപുട്ട് ഫിനോടൈപ്പിംഗ് സ്വഭാവത്തെക്കുറിച്ചുള്ള ഒരു അവലോകനം. കമ്പ്യൂട്ട്. ഇലക്ട്രോൺ. അഗ്രിക്. 178, 105731 https://doi.org/10.1016/j.
compag.2020.105731.
Yao, H., Qin, R., Chen, X., 2019. റിമോട്ട് സെൻസിംഗ് ആപ്ലിക്കേഷനുകൾക്കുള്ള ആളില്ലാ ആകാശ വാഹനം-ഒരു അവലോകനം. റിമോട്ട് സെൻസിംഗ് 11 (12). https://doi.org/10.3390/
rs11121443.
Yeom, S., 2021. ഒരു മൾട്ടിറോട്ടർ ഉപയോഗിച്ച് ഇൻഫ്രാറെഡ് തെർമൽ ഇമേജിംഗ് ഉപയോഗിച്ച് ആളുകളെ ചലിപ്പിക്കുന്ന ട്രാക്കിംഗും തെറ്റായ ട്രാക്ക് നീക്കംചെയ്യലും. ഡ്രോണുകൾ 5 (3), 65. https://doi.org/10.3390/drones5030065.
Yue, J., Feng, H., Jin, X., Yuan, H., Li, Z., Zhou, C., Yang, G., Tian, Q., 2018. ചിത്രങ്ങൾ ഉപയോഗിച്ച് ക്രോപ്പ് പാരാമീറ്ററുകൾ കണക്കാക്കുന്നതിൻ്റെ ഒരു താരതമ്യം UAV-മൌണ്ട് ചെയ്തതിൽ നിന്ന്
സ്നാപ്പ്ഷോട്ട് ഹൈപ്പർസ്പെക്ട്രൽ സെൻസറും ഹൈ-ഡെഫനിഷൻ ഡിജിറ്റൽ ക്യാമറയും. റിമോട്ട് സെൻസിംഗ് 10 (7), 1138. https://doi.org/10.3390/rs10071138.
Yue, J., Yang, G., Li, C., Li, Z., Wang, Y., Feng, H., Xu, B., 2017. ആളില്ലാ ആകാശ വാഹനം ഉപയോഗിച്ച് ശീതകാല ഗോതമ്പ് ഭൂമിക്ക് മുകളിലുള്ള ജൈവവസ്തുക്കൾ കണക്കാക്കൽ- അടിസ്ഥാനമാക്കിയുള്ള സ്നാപ്പ്ഷോട്ട്
ഹൈപ്പർസ്പെക്ട്രൽ സെൻസറും വിള ഉയരം മെച്ചപ്പെടുത്തിയ മോഡലുകളും. റിമോട്ട് സെൻസിംഗ് 9 (7). https://doi.org/10.3390/rs9070708.
Zahawi, RA, Dandois, JP, Holl, KD, Nadwodny, D., Reid, JL, Ellis, EC, 2015. ഉഷ്ണമേഖലാ വനങ്ങളുടെ വീണ്ടെടുക്കൽ നിരീക്ഷിക്കാൻ ഭാരം കുറഞ്ഞ ആളില്ലാ ആകാശ വാഹനങ്ങൾ ഉപയോഗിക്കുന്നു. ബയോൾ.
സംരക്ഷിക്കുക. 186, 287-295. https://doi.org/10.1016/j.biocon.2015.03.031. സമോറ-ഇസ്ക്വിർഡോ, എംഎ, സാൻ്റ, ജെ., മാർട്ടിനെസ്, ജെഎ, മാർട്ടിനെസ്, വി., സ്കർമെറ്റ, എഎഫ്, 2019.
എഡ്ജും ക്ലൗഡ് കമ്പ്യൂട്ടിംഗും അടിസ്ഥാനമാക്കിയുള്ള സ്മാർട്ട് ഫാമിംഗ് ഐഒടി പ്ലാറ്റ്ഫോം. ബയോസിസ്റ്റ്. എൻജിനീയർ. 177,
XXX - 4.
Zarco-Tejada, PJ, Diaz-Varela, R., Angileri, V., Loudjani, P., 2014. ആളില്ലാ ആകാശത്ത് നിന്ന് ലഭിച്ച വളരെ ഉയർന്ന റെസല്യൂഷൻ ഇമേജറി ഉപയോഗിച്ച് മരത്തിൻ്റെ ഉയരം അളക്കൽ
വാഹനവും (UAV) ഓട്ടോമാറ്റിക് 3D ഫോട്ടോ പുനർനിർമ്മാണ രീതികളും. യൂറോ. ജെ. അഗ്രോൺ. 55, 89-99. https://doi.org/10.1016/j.eja.2014.01.004.
Zhang, C., Craine, WA, McGee, RJ, Vandemark, GJ, Davis, JB, Brown, J., Hulbert, SH, Sankaran, S., 2020. ശീതകാല വിളകളിൽ പൂവിടുന്ന തീവ്രതയുടെ ഇമേജ് അടിസ്ഥാനമാക്കിയുള്ള പ്രതിഭാസം. സെൻസറുകൾ 20 (5), 1450. https://doi.org/10.3390/s20051450.
Zhang, C., Kovacs, JM, 2012. കൃത്യമായ കൃഷിക്കായി ചെറിയ ആളില്ലാ ആകാശ സംവിധാനങ്ങളുടെ പ്രയോഗം: ഒരു അവലോകനം. കൃത്യമായി. അഗ്രിക്. 13 (6), 693–712. https://doi.org/
10.1007/s11119-012-9274-5.
Zhang, L., Zhang, H., Niu, Y., Han, W., 2019. UAV മൾട്ടിസ്പെക്ട്രൽ റിമോട്ട് സെൻസിംഗിനെ അടിസ്ഥാനമാക്കി മാപ്പിംഗ് ചോളം ജല സമ്മർദ്ദം. റിമോട്ട് സെൻസിംഗ് 11 (6), 605.
ഷാങ്, എക്സ്., ഹാൻ, എൽ., ഡോങ്, വൈ., ഷി, വൈ., ഹുവാങ്, ഡബ്ല്യു., ഹാൻ, എൽ., ഗോൺസ് അലസ്-മോറേനോ, പി., മാ, എച്ച്., യെ, എച്ച്., സോബീഹ് , ടി., 2019. ഓട്ടോമേറ്റഡ് മഞ്ഞ തുരുമ്പിനുള്ള ആഴത്തിലുള്ള പഠന-അടിസ്ഥാന സമീപനം
ഉയർന്ന മിഴിവുള്ള ഹൈപ്പർസ്പെക്ട്രൽ UAV ചിത്രങ്ങളിൽ നിന്ന് രോഗം കണ്ടെത്തൽ. റിമോട്ട് സെൻസിംഗ് 11 (13), 1554.
Zhao, X., Zhang, J., Huang, Y., Tian, Y., Yuan, L., 2022. തരംഗ വിശകലനത്തോടൊപ്പം ഹൈപ്പർസ്പെക്ട്രൽ ഇമേജിംഗ് ഉപയോഗിച്ച് തേയില ചെടികളുടെ രോഗങ്ങളും പ്രാണികളുടെ സമ്മർദ്ദവും കണ്ടെത്തലും വിവേചനവും. കമ്പ്യൂട്ട്. ഇലക്ട്രോൺ. അഗ്രിക്. 193, 106717 https://doi.org/10.1016/j. compag.2022.106717.
Zheng, A., Wang, M., Li, C., Tang, J., Luo, B., 2022. ഏരിയൽ ഇമേജ് സെമാൻ്റിക് സെഗ്മെൻ്റേഷനായി എൻട്രോപ്പി ഗൈഡഡ് അഡ്വേർസേറിയൽ ഡൊമെയ്ൻ അഡാപ്റ്റേഷൻ. IEEE ട്രാൻസ്. ജി
Zheng, H., Cheng, T., Yao, X., Deng, X., Tian, Y., Cao, W., Zhu, Y., 2016. ഗ്രൗണ്ട്-ബേസ്ഡ് സ്പെക്ട്രലിൻ്റെ സമയ ശ്രേണി വിശകലനത്തിലൂടെ അരി ഫിനോളജി കണ്ടെത്തൽ സൂചിക ഡാറ്റ. ഫീൽഡ് ക്രോപ്സ് റെസ്. 198, 131-139. https://doi.org/10.1016/j.fcr.2016.08.027.
Zheng, J., Yang, W., 2018. വയർലെസ് സെൻസറുകളെ അടിസ്ഥാനമാക്കിയുള്ള കൃത്യമായ കാർഷിക ചോർച്ച സീഡിംഗ് സിസ്റ്റത്തിൻ്റെ രൂപകൽപ്പന. Int. ജെ. ഓൺലൈൻ എൻജിനീയർ. 14 (05), 184.
Zhou, L., Gu, X., Cheng, S., Yang, G., Shu, M., Sun, Q., 2020. UAV-LiDAR ഡാറ്റ ഉപയോഗിച്ച് മിച്ചമുള്ള ചെടികളുടെ ഉയരം മാറ്റങ്ങളുടെ വിശകലനം. കൃഷി 10 (5), 146. https://
doi.org/10.3390/agriculture10050146.
Zhou, S., Chai, X., Yang, Z., Wang, H., Yang, C., Sun, T., 2021. Maize-IAS: ഹൈ-ത്രൂപുട്ട് പ്ലാൻ്റ് ഫിനോടൈപ്പിംഗിനായി ആഴത്തിലുള്ള പഠനം ഉപയോഗിക്കുന്ന ഒരു ചോളം ഇമേജ് വിശകലന സോഫ്റ്റ്വെയർ . പ്ലാൻ്റ് രീതികൾ 17 (1), 48. https://doi.org/10.1186/s13007-021-00747-0.
Zhou, X., Zheng, HB, Xu, XQ, He, JY, Ge, XK, Yao, X., Cheng, T., Zhu, Y., Cao, WX, Tian, YC, 2017. ധാന്യങ്ങളുടെ വിളവ് പ്രവചിക്കുന്നു മൾട്ടി-ടെമ്പറൽ സസ്യങ്ങൾ ഉപയോഗിച്ച് അരി
UAV അടിസ്ഥാനമാക്കിയുള്ള മൾട്ടിസ്പെക്ട്രൽ, ഡിജിറ്റൽ ഇമേജറിയിൽ നിന്നുള്ള സൂചികകൾ. ISPRS J. ഫോട്ടോഗ്രാം. റിമോട്ട് സെൻസ് 130, 246–255. https://doi.org/10.1016/j.isprsjprs.2017.05.003.
Zhou, Y., Xie, Y., Shao, L., 2016. വയർലെസ് സെൻസർ നെറ്റ്വർക്കിനെ അടിസ്ഥാനമാക്കിയുള്ള ഹരിതഗൃഹ നിരീക്ഷണ സംവിധാനത്തിൻ്റെ പ്രധാന സാങ്കേതികവിദ്യയുടെ അനുകരണം. Int. ജെ. ഓൺലൈൻ എൻജിനീയർ. 12 (05),
43.
Zhou, Z., Majeed, Y., Diverres Naranjo, G., Gambacorta, EMT, 2021. കൃത്യമായ കൃഷിയിൽ ഇൻഫ്രാറെഡ് തെർമൽ ഇമേജറി ഉപയോഗിച്ച് വിള ജല സമ്മർദ്ദം വിലയിരുത്തൽ: ഒരു അവലോകനം
ആഴത്തിലുള്ള പഠന ആപ്ലിക്കേഷനുകളുടെ ഭാവി സാധ്യതകളും. കമ്പ്യൂട്ട്. ഇലക്ട്രോൺ. അഗ്രിക്. 182, 106019 https://doi.org/10.1016/j.compag.2021.106019.

{kind=link}